Abgeschlossene Forschungsprojekte
Robotik






Engineering-Systeme









Automatisierungstechnik
Keine Beiträge vorhanden.
Medizintechnik
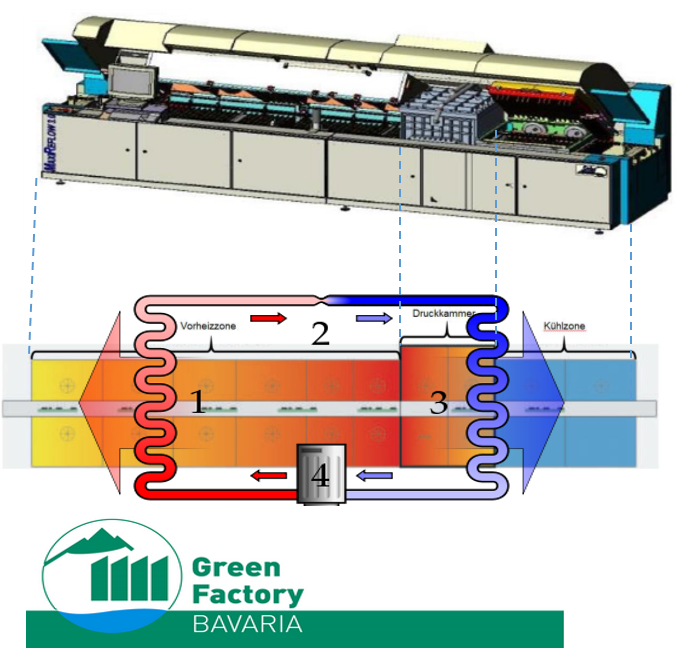
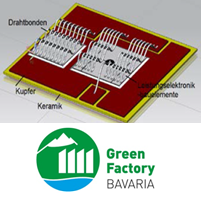
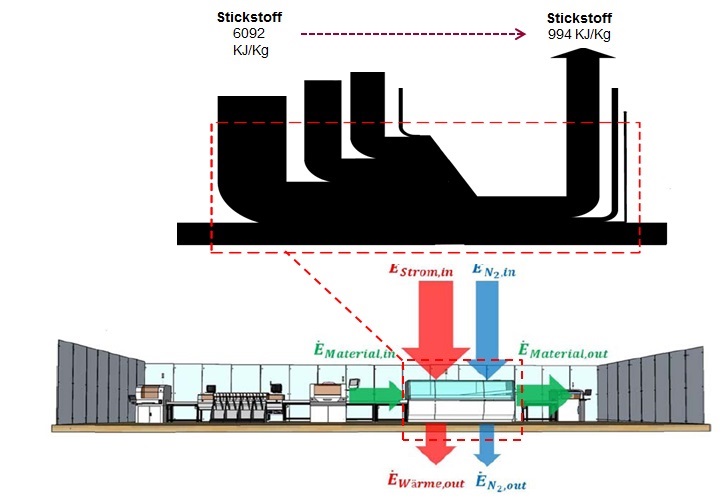
Elektronikproduktion



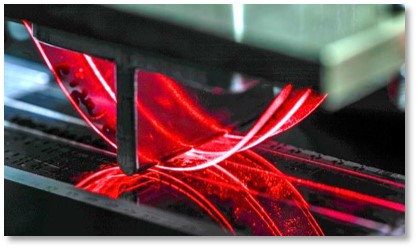


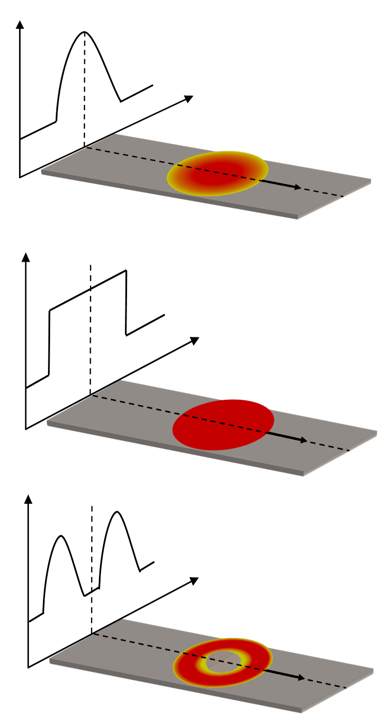
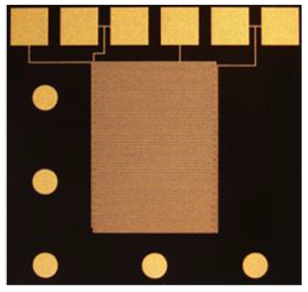
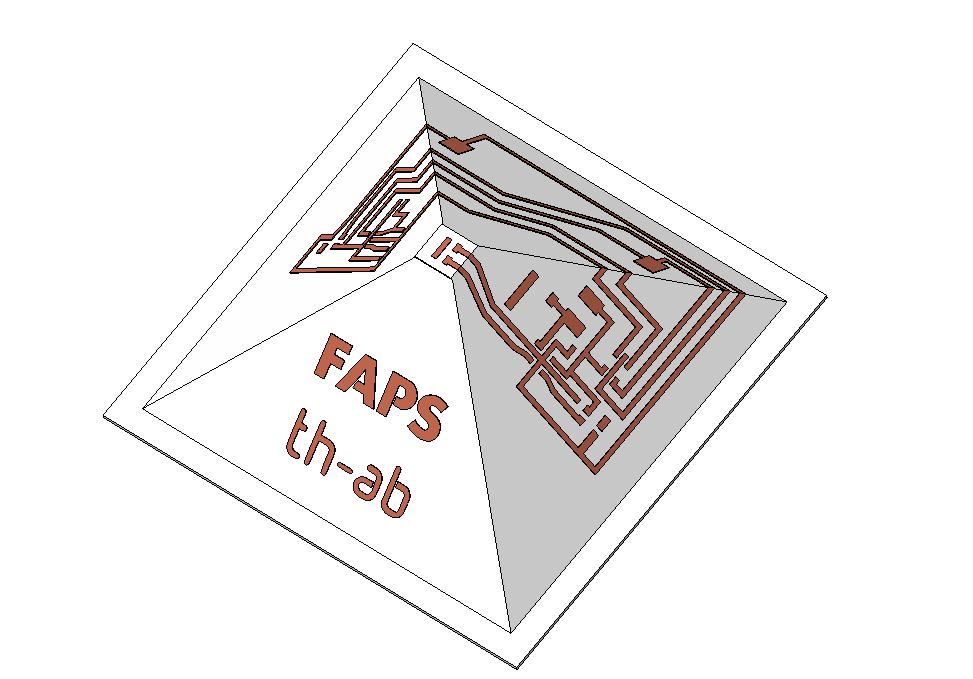
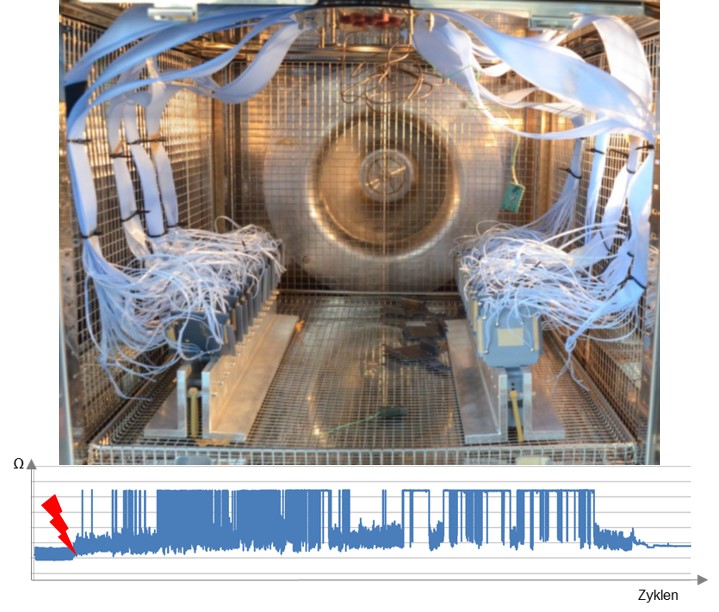
![Zum Artikel "Digitaldruck organischer Optoelektronik auf 3D-Körper [OLE-3D]"](/wp-content/uploads/2018/06/Bild1.jpg)





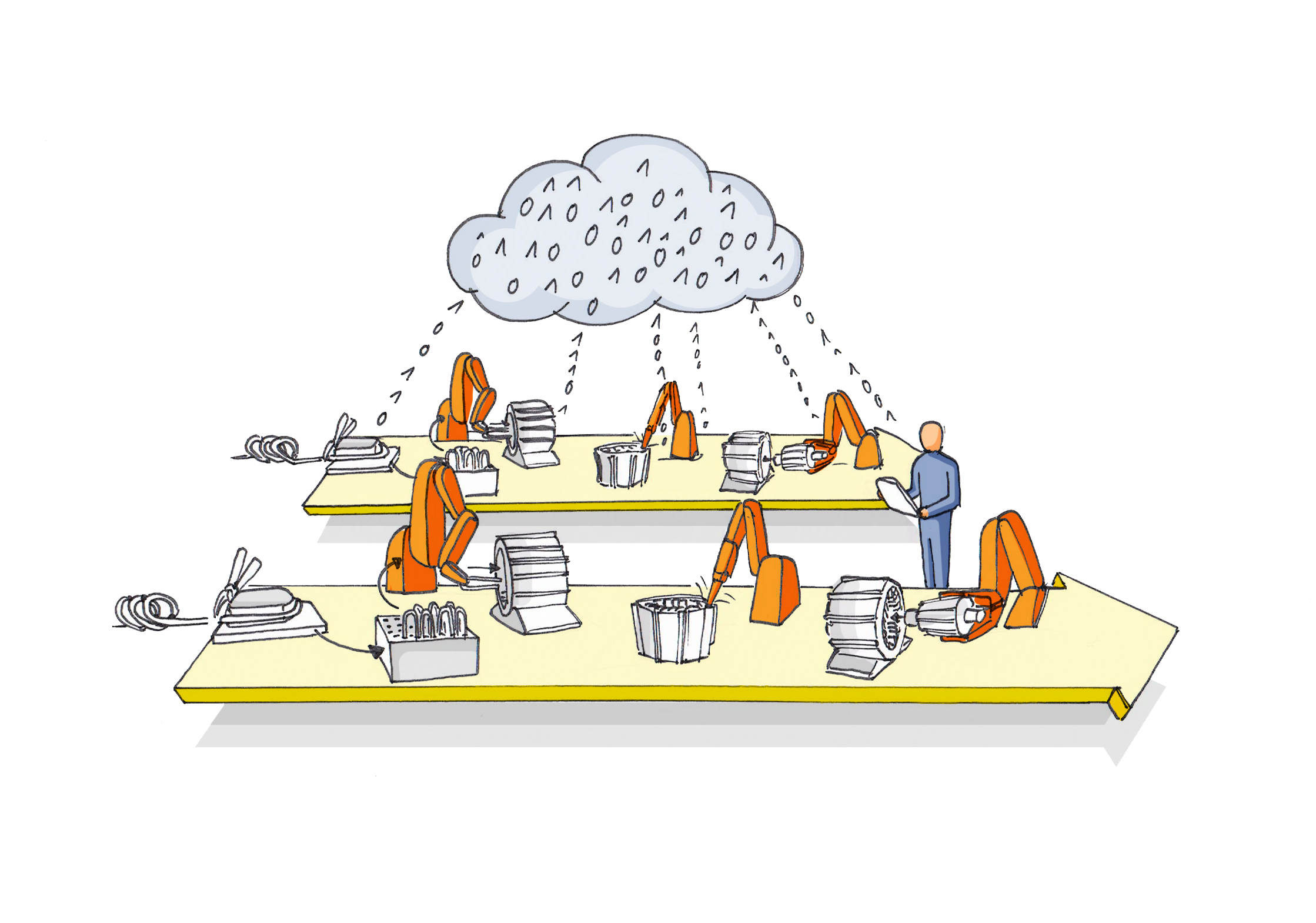
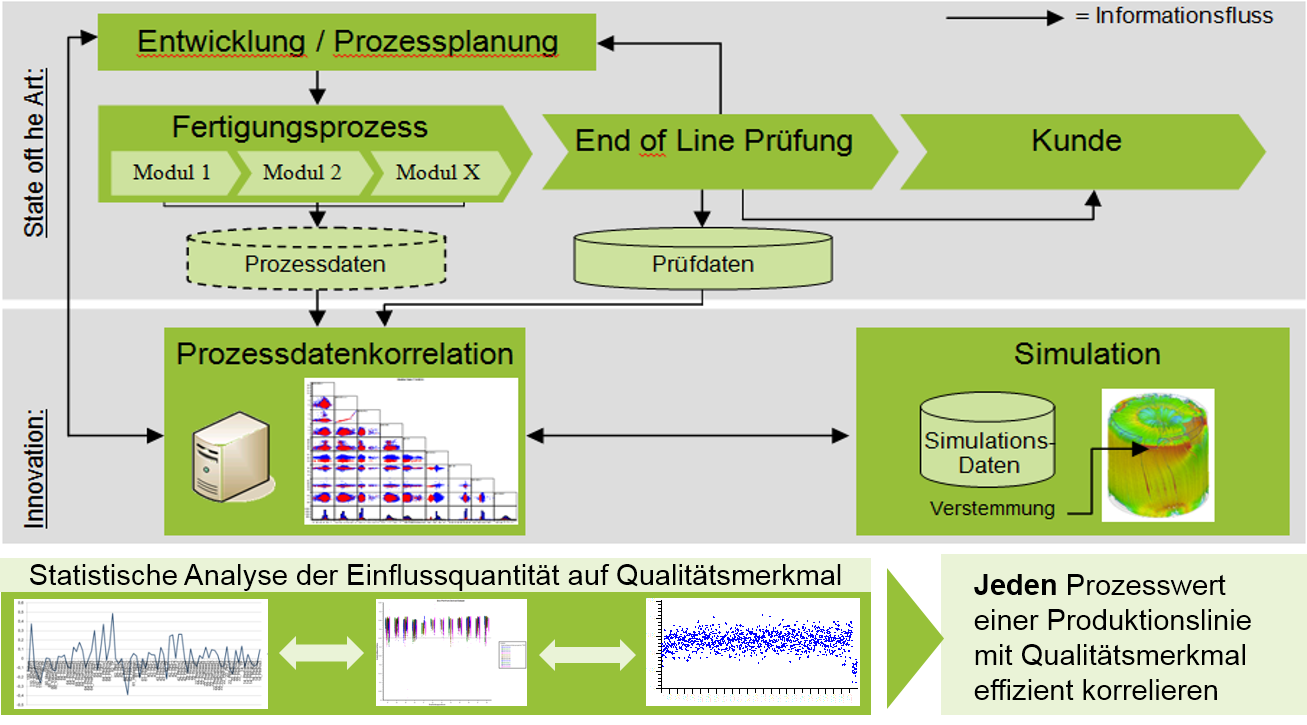
Elektromotorenproduktion




Electric Road Systems
Keine Beiträge vorhanden.
Signal- und Leistungsvernetzung
Keine Beiträge vorhanden.