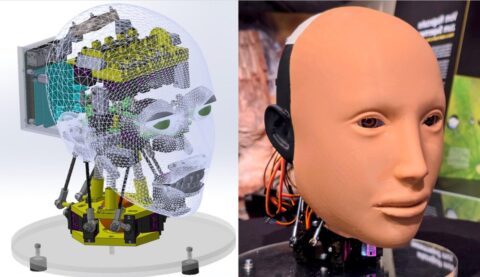
We are looking for curious and motivated master’s students to join an exciting research project on the detection of human microexpressions for applications in humanoid robotics and human-robot interaction. This thesis combines computer vision, affective computing, and social robotics, contributing t...


![Zum Artikel "Siemens AG [BA/MA Extern]: Entwicklung einer Methodik zur effizienten Generierung von Trainingsdaten für Vision Language Action (VLA) Modell-basierte Robotermanipulation"](/wp-content/uploads/2026/03/Symbolbild-480x303.png)
