Index
Lernfähige autonome Roboterfähigkeiten und immersive Teleoperation
Mehr denn je gewinnen adaptive, flexible Robotersysteme branchenübergreifend an Bedeutung. Roboter werden dabei zunehmend zur Verrichtung komplexer individueller Aufgaben eingesetzt (u.a. in Produktion / Intralogistik, Medizintechnik / Pflege, Kerntechnik, Subsea, Aerospace). Hierbei spielen autonome Roboterfähigkeiten auf Basis von Technologien des maschinellen Lernens sowie die kognitiven Fähigkeiten des Menschen eine wichtige Rolle. Auf diesen basierende Entwicklungen finden daher auch zunehmend Einzug in industrielle Applikationen.
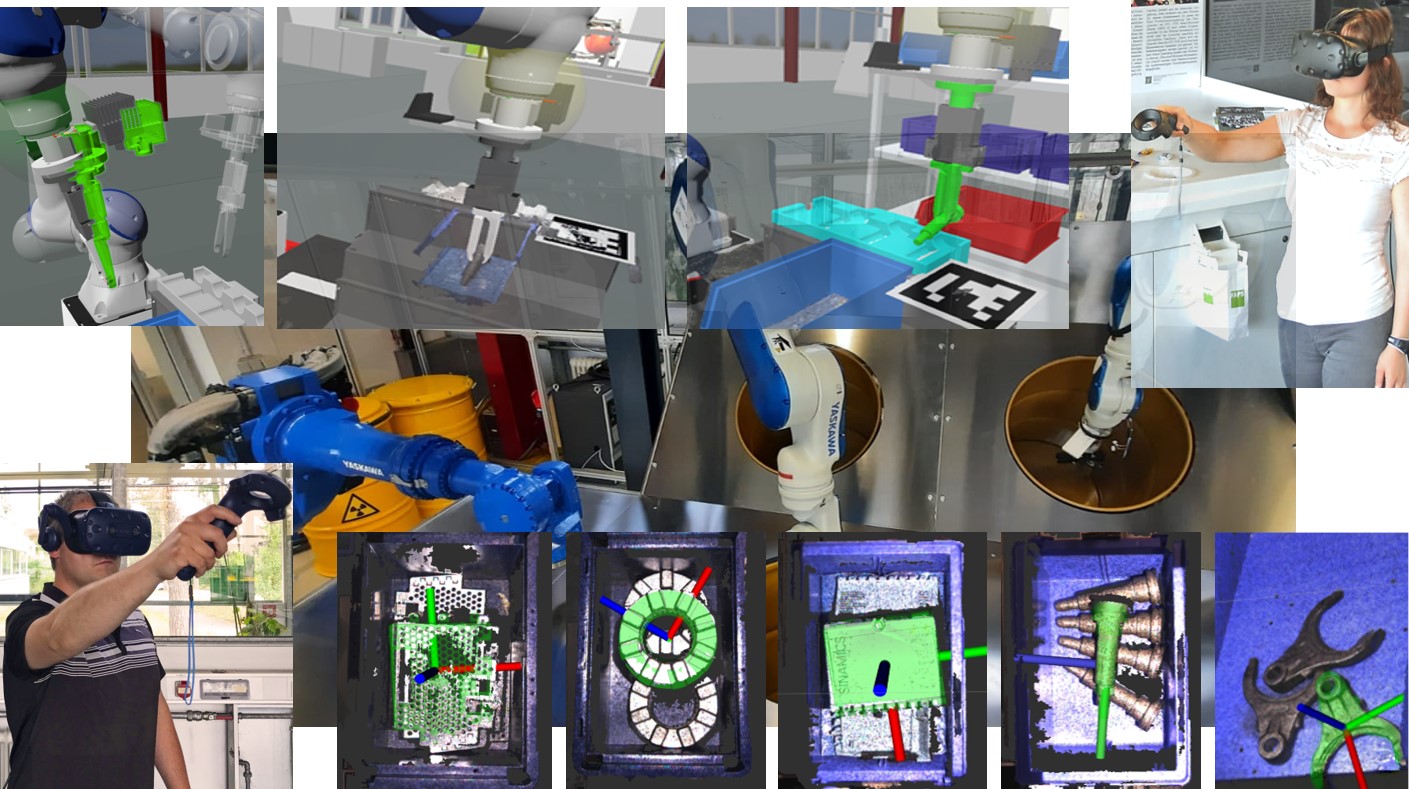
Zwecks robotergestützter Handhabung, Vereinzelung und Sortierung ungeordnet bereitgestellter Teile (vgl. Bin-Picking) mit individuellem Charakter, ergeben sich zahlreiche Herausforderungen aus der aktuellen Robotikforschung. Am Lehrstuhl FAPS wurde hierzu in den vergangenen Monaten eine einzigartige Multi-Roboter-Versuchsanlage errichtet.
Mögliche Themengebiete für eine studentische Arbeit, Auswahl eines Themas nach Interesse
- Entwicklung, Konstruktion, Integration und Erprobung mechatronischer Systeme im Anwendungskontext (u.a. Greifer, Trennscheren, usw.)
- Augmented Virtuality (AV) bzw. Virtual Reality (VR) Multi-Roboter Teleoperation sowie Absicherung der Roboter
- Bildverarbeitung zur effizienten Segmentierung und räumlichen Umgebungsbeschreibung mittels Deep Learning Technologien
- Rekonstruktion hochindividueller Handhabungsobjekte anhand Sensordaten sowie Posebestimmung dieser Objekte im Raum
- Autonomes Greifen von Teilen (u.a. auf Basis von Ansätzen des generative Graspings)
- Entwicklung einer Operatorentlastung bei der Teleoperation durch verbesserte Immersion sowie einer prozessspezifischen Wissensintegration auf Basis aktueller Gaming Engines
- Untersuchung von Ansätzen des Human-in-the-Loop (HuITL) Imitation Learnings und Active Learnings zur Adaption von Fähigkeiten durch den Menschen
Eine Arbeit beinhaltet je nach Absprache die folgenden Aspekte
- Einarbeitung in erforderliche Teile der bestehenden Hardware und Software
- Themenspezifische Recherche des Stands von Wissenschaft und Technik
- Entwicklung einer Methode bzw. eines Teilsystems
- Beispielhafte Umsetzung des eigenen Ansatzes
- Erprobung und Bewertung der Entwicklung im Rahmen der Versuchsanlage
Weitere Informationen erhalten Sie gerne auf Anfrage.
Der Arbeitsumfang sowie die spezifischen Inhalte der jeweiligen Arbeit werden entsprechend der Art der Arbeit sowie den eigenen Interessen angepasst.
Fehlende Vorkenntnisse können im Rahmen der Einarbeitungsphase erschlossen werden.
Vorkenntnisse und Anforderungen
Interesse an anwendungsnaher Fertigungsautomatisierung und Robotik
Vorkenntnisse in Abhängigkeit der Themenstellung:
Implementierungsnah: C++, Python (oder vergleichbarer Programmiersprache) von Vorteil
Hardwarenah: Erfahrungen bei der Konstruktion und Auslegung mechatronischer Systeme von Vorteil
Beginn
ab sofort
Anfrage am besten kurz per Mail oder telefonisch.
Ansteuerung von künstlichen Muskeln auf Basis von dielektrischen Elastomeren mit Hilfe eines künstlichen neuronalen Netzes
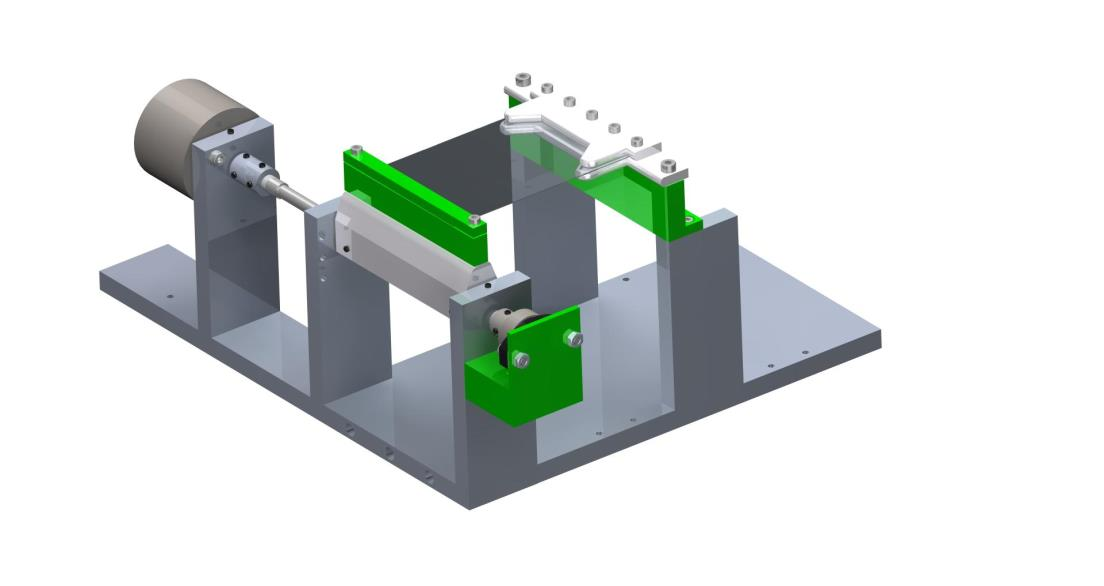
Dielektrische Elastomere werden aufgrund ihrer mechanischen Eigenschaften, ihrer sensorischen und aktorischen Eigenschaften oft als künstliche Muskeln bezeichnet. Im Vergleich zu den herkömmlichen hydraulischen und pneumatischen Aktoren zeigen Dielektrische-Elastomer-Aktoren (DEA) somit Vorteile bezüglich Reaktionsgeschwindigkeit, hoher Energiedichte und im Leichtbau. Für den Ensatz in verschiedensten Bereichen wie der Robotik sind allerdings effiziente Ansteuerungsmöglichkeiten notwendig.
Ziel dieser Arbeit ist es, durch Nutzung eines vorhandenen mechatronischen Systems in Kombination mit künstlichen Muskeln, Datensätze zu erzeugen, um diese für das Training eines künstlichen neuronalen Netzes (KNN) zu verwenden.
Die Arbeit beinhaltet folgende Schwerpunkte:
- Einarbeitung und Optimierung des vorhandenen mechatronischen Systems
- Integration eines künstlichen Muskels in den Demonstratoraufbau
- Optimierung der erzeugten Trainingsdatensätze für das KNN
- Training und Evaluation des neuronalen Netzes zur Ansteuerung des Demonstratoraufbaus in unterschiedlichen Belastungssituationen
Was Du mitbringen sollest:
- Selbstständige und motivierte Arbeitsweise
- Begeisterung für innovative Technologien
- Kreativität und gute Auffassungsgabe
- Grundkenntnisse in der Programmierung
Beginn:
ab sofort
Automatisiertes Entdeckeln von Abfallfässern mittels Roboter
Aufgabenbeschreibung
· Robotergestützte Ent- und Verschraubung von Fassdeckeln auf einem 200l-Fass
· Erste Konstruktion des Roboteraufbaus (inkl. Faßzentrierung)
· Unterstützung der Auslegung eines Werkzeugs zum Öffnen der Schrauben, Festhalten der Schraubverbindungselemente, sowie das Ablegen in einer Ablageposition (Stift o.ä.)
· Auslegung von Roboter in Reichweite, Leistung, und ggf. der Möglichkeit einer Kraftregelung
· Bilderkennung der Schraubenpositionen
Anforderungen
• Masterand im Bereich Maschinenbau, Mechatronik oder vergleichbar
• Interesse an Robotik
• Kenntnisse im Bereich von Bilderkennungstechnik und –software wünschenswert
Beginn ist ab sofort möglich
Image Registration mit Deep Learning
Ausgangssituation
Um die Absolutgenauigkeit von 6-Achs-Industrierobotern zu verbessern, wird ein Computer-Vision-basiertes Regelungssystem entwickelt. Die 6D Pose des Bauteils am Endeffektor des Roboters muss sehr genau innerhalb eines großen Messraums bestimmt werden. Damit diese Ziele erreicht werden können, werden mehrere Kameras gleichzeitig verwendet. Mit Image Registration werden die Bilder von verschiedenen Kameras in dasselbe Koordinatensystem transformiert. Die dadurch erzeugten hochgenauen konsistenten Bilddaten können dann von nachfolgenden Algorithmen genutzt werden.
Aufgabenschwerpunkte
- 2D-2D, 2D-3D und 3D-3D Registration
- Subpixel Algorithmen
- Kamerakalibration
Vorkenntnisse
- Python Kenntnisse wünschenswert
- Computer Vision Kenntnisse wünschenswert
- Deep Learning Kenntnisse wünschenswert
- ROS Kenntnisse von Vorteil
- C++ Kenntnisse von Vorteil
BA/MA/Praktikum SIEMENS: Analyse und Lösungsspezifikation skalierbarer Automatisierungspotenziale in der Logistik

Ausgangssituation:
Im Gerätewerk Erlangen (GWE) werden leistungselektronische Komponenten, sowie Bedien- und Steuergeräte gefertigt. Als Fertigungs- und Logistikstandort strebt das GWE sowohl nach einer Erhöhung des Automatisierungsgrads als auch nach einer Entlastung der Mitarbeiter von ergonomisch ungünstigen Tätigkeiten. In unserem Logistikcenter soll dies durch die flexible und skalierbare Automatisierung umgesetzt werden. Oftmals erfolgt die Analyse von Automatisierungspotenzialen dabei anhand existierender Arbeitsstationen. Da diese jedoch weitestgehend auf den Menschen ausgerichtet sind bedarf es einer detaillierten Analyse der Prozesse sowie Marktrecherche um daraus ein flexibles und skalierbares Automatisierungskonzept ableiten zu können
Ziel der Arbeit ist die systematische Analyse der Wertströme und Logistikprozesse, um daraus eine Automatisierungsroadmap abzuleiten. Hierzu sind die anfallenden Tätigkeiten gemeinsam mit den Schnittstellenpartnern aufzunehmen und anhand ihres Automatisierungspotentials neu zu gestalten. Dies erfordert eine vorausgehende Recherche zu Technologien und Trends für eine automatisierte Logistik.
Mögliche Schwerpunkte der Arbeit:
- Technologie- und Trendrecherche zur Automatisierung in der Logistik
- Analyse der Istwertströme und Prozesse
- Ermittlung des Automatisierungsgrads und Identifikation von Automatisierungspotentialen
- Systematische Unterteilung und Strukturierung der Tätigkeiten als Grundlage automatisierungsgerechter Prozesse
- Erarbeitung von Technologieempfehlungen zur Automatisierung der einzelnen Prozessschritte
- Kritische Evaluation der Ergebnisse
- Dokumentation der Arbeit
Sie bringen mit:
- Spaß und Initiative bei der Zusammenarbeit mit interdisziplinären Schnittstellenpartnern
- Gute Auffassungsgabe
- Selbstständige Arbeitsweise
Die Bearbeitung findet vor Ort bei Siemens im Gerätewerk Erlangen, mit entsprechender Aufwandsentschädigung, statt.
Der Arbeitsumfang wird entsprechend der Art der Abschlussarbeit angepasst. Gerne ist auch eine Kombination, mit entsprechender Aufteilung der Inhalte, mit einem abzuleistendem Pflichtpraktikum möglich.
Bewerbungen ausschließlich per Email mit aussagekräftigen Unterlagen (Anschreiben, Lebenslauf, Zeugnisse)