Index
SynaPSe – Synthetische adaptive Umgebungen und Daten-Pipelines für autonome Systeme

Autonome und automatisierte Landmaschinen können einen wichtigen Beitrag zu einer wirtschaftlicheren, ressourcenschonenderen und robusteren Landwirtschaft leisten. Voraussetzung dafür sind leistungsfähige KI-Modelle, die auch unter stark variierenden Einsatzbedingungen zuverlässig funktionieren. Die dafür erforderlichen realen Sensordaten sind jedoch kosten- und zeitintensiv zu erfassen und nur begrenzt skalierbar.
Das Forschungsvorhaben SynaPSe entwickelt daher eine durchgängige Pipeline für das effiziente Training von KI-Modellen autonomer Landmaschinen mit synthetischen Daten. Hierzu werden modulare Simulationsansätze mit generativer KI kombiniert, um realitätsnahe und variantenreiche Agrarumgebungen automatisiert zu erzeugen. Ergänzende Methoden zur Nachbearbeitung synthetischer Sensordaten und zur Domain Adaptation sollen die Übertragbarkeit der trainierten Modelle auf reale Maschinen verbessern.
Ein Active-Learning-gestützter Ansatz identifiziert gezielt Schwachstellen der KI-Modelle und generiert bedarfsgerecht neue Trainingsdaten. Ein Open-Source-basiertes MLOps-Framework orchestriert die Pipeline von der Datenerfassung über Training und Validierung bis zum Deployment.
Am Lehrstuhl FAPS liegt der Schwerpunkt insbesondere auf der Erforschung generativer KI-Ansätze zur Gestaltung synthetischer Umgebungen sowie auf Methoden für das effiziente Training von KI-Modellen. Validiert wird die Pipeline anhand zweier Anwendungsfälle aus der lokalen Navigation: der Fahrgassenführung im Feld sowie der Fahrgassenführung im Weinbau.
Adaptive und benutzerfreundliche Kollaboration von Menschen und autonomen mobilen Robotern durch kontinuierlich lernende Algorithmen

Die Adaption und Inbetriebnahme eines autonomen mobilen Roboters für neue bzw. veränderte Arbeitsabläufe und Umgebungen verursacht einerseits Kosten durch die notwendige Beauftragung von Experten und kann andererseits dazu führen, dass der Roboter zeitweise nicht vollumfänglich einsetzbar ist.
Das Forschungsvorhaben KoLAMeRo erarbeitet und demonstriert Lösungsansätze, wie diese Hürden mittels des Einsatzes von automatisierten kontinuierlichen Lernverfahren überwunden werden können.
FORSocialRobots – Soziale Fähigkeiten für automatisierte Systeme und Roboter
Die Vision des Konsortiums in FORSocialRobos besteht darin, dass Mensch und Roboter gemeinsam in flexiblen Teams in allen Bereichen des täglichen Lebens zielführend zusammenarbeiten und neue Roboterapplikation in kürzester Zeit realisiert werden können. Das Projekt FORSocialRobots soll daher in sechs relevanten Anwendungsfeldern robotischer Applikationen (Inspektion, Logistik, Produktion, Service, Seniorenheim und Demenzzentrum) und in fünf wissenschaftlichen Teilprojekten (Architektur sozialer Fähigkeiten, sozial situative Kommunikation, sozial adaptive und proaktive Interaktion, Simulation und Validierung sozial kognitiver Roboter im Digitalen Zwilling und Mensch-Roboter-Interaktion im Arbeitskontext) einen entscheidenden Beitrag zur Verbesserung der sozialen Fähigkeiten von Robotern leisten, damit deren Wirksamkeit und Akzeptanz bei den potenziellen Nutzern steigern sowie völlig neue technische Entwicklungen unterstützen.
Das Projektvorhaben ist dabei auf drei Jahre angelegt. Das Projektkonsortium besteht aus Forschungseinrichtungen, Einrichtungen der angewandten Forschung, Unternehmen und Anwendern, welche gemeinsam sowohl das Know-how besitzen, Roboter physisch und softwareseitig zu erforschen als auch geeignete Anwendungsfälle exemplarisch umzusetzen und dabei ethische, rechtliche und soziale Implikationen (ELSI) zu beachten. Prof. Jörg Franke ist der Sprecher des Forschungsverbundes und der Lehrstuhl FAPS übernimmt die Rolle der Verbundkoordination.
Der Lehrstuhl FAPS ist für das Teilprojekt 1 “Architektur sozialer Fähigkeiten” verantwortlich. Weiterhin ist er am Teilprojekt 5 “Mensch-Roboter-Interaktion im Arbeitskontext” beteiligt. Hier liegt der Fokus auf der Erforschung der Akzeptanz sozialer Roboter in verschiedenen industriellen Szenarien und der Frage was für eine erfolgreiche Integration sozialer Roboter in existierende Arbeitsabläufe beachtet werden muss. Letztlich wird neben der internen Koordination auch die externe Kommunikation des Projekts durch den Lehrstuhl FAPS geleitet.
POV.OS – Entwicklung einer innovativen Automatisierungsplattform als offene Architektur aus Hardware und Software für den Einsatz und die Funktionalisierung von mobilen Arbeitsmaschinen
Im Verbundprojekt POV.OS soll eine innovative Automatisierungsplattform als offene Architektur aus Hardware und Software für den Einsatz und die Funktionalisierung von mobilen Arbeitsmaschinen entwickelt werden. Das Ziel des Projektes ist die ganzheitliche Konzeption und demonstrative Umsetzung einer anwendungsübergreifenden Plattform mit modularen Systemkomponenten, die als Grundlage für eine Spezifizierung und Umsetzung anwendungsbezogener Automatisierungs-, Assistenz- und autonomer Fahrfunktionen genutzt werden kann.
Eine zentrale Recheneinheit mit sicheren und zertifizierten Komponenten sowie standardisierte Schnittstellen ermöglicht allen Firmen der Wertschöpfungskette für professionelle Arbeitsmaschinen die rasche Entwicklung und Modifikation von relevanten Produkten. Durch eine Vernetzung sowie die Möglichkeit der Simulation der mobilen Arbeitsmaschinen unter Nutzung einer einheitlichen Hardware werden zudem zukünftige Entwicklungszeiten und die Einspielung von Updates sowie Upgrades optimiert. Der Fokus des Vorhabens liegt dabei auf der Entwicklung und demonstrativen Umsetzung eines gemeinsamen Kernsystems aus Hardware- und Softwarekomponenten für Ansteuerung, sensorische Erfassung und Vernetzung der professionellen Arbeitsmaschinen.
Durch eine vorwettbewerbliche Zusammenarbeit von Komponentenzulieferer, Fahrzeughersteller, IT-Unternehmen und Forschungseinrichtungen werden Kompetenzen aus allen Bereichen der mobilen Arbeitsmaschinen eingebracht.
Der Lehrstuhl FAPS beschäftigt sich im Rahmen von POV.OS unter anderem mit dem Aufbau einer Entwickler- und Anwenderplattform, dem Themenkomplex des digitalen Zwillings, der Nutzung und Anpassung von ROS 2 sowie der Funktionalisierung von professionellen Arbeitsmaschinen mit einem autonomen Routenzugschlepper als Anwendungsfall.
K3I-Cycling – KI-gestützte Optimierung der Kreislaufführung von Kunststoffverpackungen
Das Ziel von K3I-Cycling [sprich: kiː] ist es, das werkstoffliche Recycling von Post-Consumer-Kunststoffverpackungsabfällen in quantitativer und qualitativer Hinsicht deutlich zu verbessern. Zu diesem Zweck entwickelt K3I-Cycling mithilfe eines sogenannten Artificial Neural Twins eine neue, offene und standardisierbare KI-Schnittstelle. Folglich können relevante Informationen über verschiedene Sektoren hinweg für einen Leichtverpackungs-Produktpass gesammelt werden. Dadurch wird es erstmals möglich, alle Stakeholder entlang der Wertschöpfungskette digital zu vernetzen. Ein Artificial Neural Twin ist eine vollständig differenzierbare Darstellung eines Gesamtsystems, mit der Einzelkomponenten im Verhältnis zum gesamten System optimiert werden können. Hierbei werden verschiedene sensorische Informationen entlang des Materialflusses als Daten erfasst.
Am Lehrstuhl FAPS wird in Kooperation mit der Siemens AG zur roboterbasierten Materialtrennung geforscht. Ein Roboter soll Fremdobjekte aus einem Stoffstrom von Kunststoffleichtverpackungen aussortieren. Dafür sollen einerseits Algorithmen aus dem maschinellen Lernen zur Poseschätzung und Greifplanung zum Einsatz kommen. Andererseits soll ein seilgetriebener Mechanismus verwendet werden, der aufgrund von Leichtbau besonders schnelle Sortieroperationen ausführen kann.
Weitere Informationen zum Projekt finden Sie hier.
AutoTron – Steigerung der Effizienz und Erweiterung des Anwendungsbereichs der robotergestützten Neutronendiffraktometrie
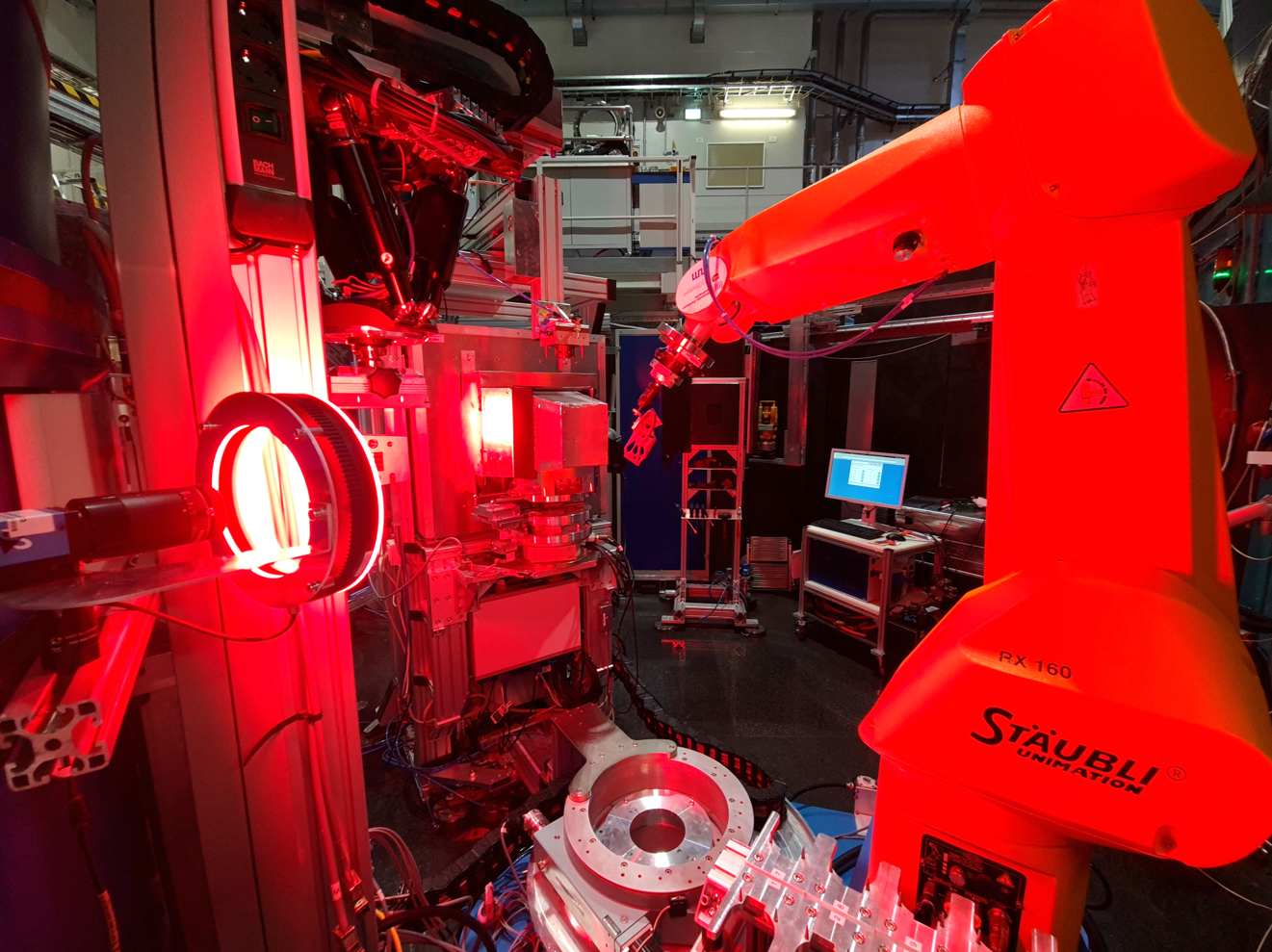
Im Rahmen des durch das BMBF geförderten Forschungsprojekts AutoTron wird gemeinsam mit dem Heinz Maier-Leibnitz Zentrum der TU München die Steigerung der Effizienz und die Erweiterung des Anwendungsbereichs der robotergestützten Probenpositionierung bei der Neutronendiffraktometrie erforscht. Das im Vorgängerprojekt RAPtOr entwickelte Robotersystem mit einer einer absoluten Positioniergenauigkeit von unter 50 μm ist nun in der Lage, die meisten wissenschaftlichen Fälle bei STRESS-SPEC zu bearbeiten und eröffnet neue Messmöglichkeiten.
Im Nachfolgeprojekt AutoTron wird diese neu gewonnene Flexibilität weiter ausgebaut und der höhere Automatisierungsgrad dazu genutzt, um den Zeit- und Arbeitsaufwand für die Kalibrierung der Geräte und die Einrichtung der Proben um 20% zu reduzieren. Damit werden die Messmöglichkeiten weiter ausgebaut und gleichzeitig die Effizienz und Nutzbarkeit des thermischen Neutronendiffraktometers STRESS-SPEC am MLZ in Garching deutlich verbessert.
Darüber hinaus wird es möglich, die immer komplexer werdenden Probengeometrien (z.B. additiv gefertigte Bauteile) durch etablierte Assistenzsysteme weniger fehleranfällig zu positionieren. Diese Systeme vereinfachen und beschleunigen die Aufgaben der Wissenschaftler bei der Probenvorbereitung, der Ausrichtung und der Definition der Messorte während eines Experiments und ermöglichen neue Messoptionen, wie die vollständige Auswertung des Spannungstensors bei komplexen Probenformen.
Automatische Überwachung des Baufortschritts durch Anwendung von Künstlicher Intelligenz und Robotik

Gefördert durch das Bundesministerium für Wirtschaft und Klimaschutz (BMWK) im Rahmen der Industriellen Gemeinschaftforschung des DLR wird im Forschungsprojekt “Automatische Überwachung des Baufortschritts durch Anwendung von Künstlicher Intelligenz und Robotik” (BauKIRo) eine Lösung für die automatisierte Erfassung des Baufortschritts durch einen autonomen Flugroboter und die Auswertung der erfassten Ist-Daten (as-built model) über einen automatisierten Abgleich mit den Planungsdaten (as-planned model) erforscht. Das Forschungsprojekt wird durch den Lehrstuhl FAPS in enger Zusammenarbeit mit der Hochschule Schmalkalden (Prof. Dr.-Ing. M. Schweigel) bearbeitet.
Der Lehrstuhl FAPS wird zur demonstrativen Umsetzung der automatisierten Erfassung des Baufortschritts durch einen autonomen Flugroboter zunächst ein mobiles Sensorsystem, ausgestattet mit optischen Sensoren zur Umgebungserfassung und Lokalisierung des Systems, zur Erfassung des Ist-Zustands konzipieren und aufbauen. Anschließend wird das Sensorsystem in einen Flugroboter integriert. Im weiteren Projektverlauf wird eine Lösung zur kollisionsfreien Navigation für die systematische Erfassung der Baustelle erarbeitet. Der Fokus liegt hierbei insbesondere auf Innenbereichen der Baustelle. Hierzu wir ein SLAM-Algorithmus konzipiert, der basierend auf erfassten semantischen Merkmalen (z.B. Tür, Fenster, Rohr etc.) und von BIM-Daten die Navigation und Erfassung der sich stetig ändernden Baustelle durch den Flugroboter ermöglicht. Des Gesamtsystem soll auf realen Baustellen validiert werden. Der automatisierten Abgleich der erfassten Daten mit den Planungsdaten wird durch die Hochschule Schmalkalden erforscht.
Roboter im Massivbau unterstützende Lösung unabhängig vom Steinformat (RoMuLuS)
Das Bauwesen steht vor erheblichen strukturellen Herausforderungen. Handwerkliche Berufe verlieren zunehmend an Attraktivität, insbesondere aufgrund physisch belastender Arbeitsbedingungen, unregelmäßiger Arbeitszeiten und langfristiger gesundheitlicher Folgen. Verstärkt wird diese Entwicklung durch den demografischen Wandel, eine zunehmende Akademisierung sowie den Rückgang ausländischer Arbeitskräfte, was insgesamt zu einem spürbaren Fachkräftemangel im Bauhandwerk führt. Gleichzeitig zählt das Baugewerbe zu den wirtschaftlich bedeutendsten Branchen in Deutschland und steht angesichts steigender Investitionen vor der Aufgabe, zukünftige Bauvorhaben trotz begrenzter personeller Ressourcen realisieren zu können. International wird dieser Problematik bereits mit der systematischen Automatisierung und Robotisierung von Bauprozessen begegnet, wobei Länder wie Japan als technologische Vorreiter gelten. Um langfristig wettbewerbsfähig zu bleiben, ist es daher erforderlich, auch in Deutschland die Automatisierungspotenziale im Bauwesen gezielt zu erschließen.
Ziel
Ziel des Vorhabens „RoMuLuS“ ist die Entwicklung eines autonomen Mauerwerksroboters zur Bewältigung der Personalknappheit und zur Steigerung der Produktivität auf deutschen Baustellen. Das System soll den hohen Automatisierungsgrad einer Fertigungshalle mit der Flexibilität eines mobilen Roboters vereinen und eine vollautomatische Errichtung von Mauersegmenten ermöglichen. Hierzu umfasst das Konzept nicht nur die Automatisierung des eigentlichen Mauervorgangs, sondern auch die integrierte Materiallogistik. Der Roboter ist in der Lage, unterschiedliche Steinformate zu handhaben, Baumaterialien zuzuführen und Verbindungsmaterial präzise aufzutragen. Mauersteine und Verbindungsmaterialien werden am Baustellenrand bereitgestellt und sequenzgerecht durch autonome Transportsysteme, beispielsweise Drohnen, zum Roboter geliefert.
Lösungsweg und Ergebnisse
Die Umsetzung des automatisierten Mauersystems erfolgte in mehreren aufeinander abgestimmten Arbeitspaketen, die sowohl die technische Entwicklung als auch die organisatorische Strukturierung des Projekts abdeckten. Im Rahmen des Forschungsvorhabens war eine strukturierte Bearbeitung in fünf Arbeitspaketen vorgesehen, um die Entwicklung einer autonomen Automatisierungslösung für die Handhabung von Baumaterialien auf Baustellen systematisch umzusetzen.
Im ersten Arbeitspaket wurde der Anwendungsfall konzipiert, indem spezifische Anforderungen und Rahmenbedingungen typischer Baustellensituationen erfasst und konsolidiert wurden. Auf dieser Grundlage wurde ein klar abgegrenzter, repräsentativer Use Case definiert, der mit gängigen CAD-Tools digital abgebildet wurde und als Ausgangspunkt für alle weiteren Entwicklungsschritte diente. Parallel wurde ein systematischer Vergleich verschiedener Roboterkonzepte durchgeführt, bei dem technische Machbarkeit, Flexibilität, Integrationsfähigkeit in bestehende Baustellenprozesse sowie wirtschaftliche Aspekte untersucht wurden. Ergebnis war die Auswahl eines neuartigen Roboterkonzepts, das die gestellten Anforderungen am besten erfüllte.
Das zweite Arbeitspaket umfasste die Entwicklung der automatisierten Handhabung, bei der auf den definierten Anforderungen ein Robotersystem spezifiziert wurde, das unterschiedliche Mauersteinformate flexibel greifen und bewegen kann. Es wurden zwei zentrale Komponenten realisiert: ein automatisierter Greifer für die Handhabung von Mauersteinen sowie ein System für den automatisierten Mörtelauftrag. Beide Module wurden prototypisch aufgebaut und hinsichtlich Funktionalität und Eignung validiert. Sensortechnik wurde gezielt eingesetzt, um exakte Positionierung und Überwachung des Arbeitsraums sicherzustellen.
Im dritten Arbeitspaket wurde das Materialbereitstellungskonzept simulative entwickelt. Das Mauerwerk wurde anhand von Planungsdaten analysiert, um den genauen Bedarf an Steinen sowie deren Bereitstellungsreihenfolge abzuleiten. Darauf aufbauend entstand eine modulare Simulationsbibliothek, die unterschiedliche Szenarien flexibel abbildet. Besonderes Augenmerk lag auf der Simulation des Materialflusses und der Analyse möglicher Störungen in der Materialzufuhr. Diese Untersuchungen ermöglichten belastbare Aussagen zur Prozessoptimierung, Ressourceneffizienz und Systemrobustheit.
Durch regelmäßige Abstimmungen zwischen den Projektpartnern und die Einbindung eines projektbegleitenden Ausschusses wurde ein kontinuierlicher Wissensaustausch sichergestellt. Statusberichte, Zwischen- und Abschlussdokumentationen sowie wissenschaftliche Veröffentlichungen stellten sicher, dass die Projektergebnisse sowohl in die Fachwelt als auch in die industrielle Praxis überführt werden konnten.
Der Schlussbericht zu diesem Projekt (IGF-Vorhaben FKZ 22281 N) ist über die Forschungsvereinigung Forschungskuratorium Maschinenbau e.V. – FKM. verfügbar. Für weitere Informationen sowie zur Verfügbarkeit des Schlussberichtes wenden Sie sich bitte an: Forschungsvereinigung FKM e.V., E-Mail: info@fkm-net.de
TAQO-PAM – Maßgeschneiderte Quantenoptimierung zur Planung und Steuerung industrieller Fertigung
Das Projekt TAQO-PAM befasst sich mit der Echtzeitoptimierung von Produktion und Intralogistik, insbesondere von modernen Matrix-Fertigungsanlagen, mit Hilfe von hybriden, quanten-klassischen Algorithmen, die an maßgefertigte mittelfristig verfügbare NISQ-Hardware angepasst sind. Dies erfolgt durch die ganzheitliche Integration problemspezifisch adaptierter Quantenprozessoren (Quantum Processing Units, QPUs) in bestehende Szenarien und durch Erweiterung existierender Methoden der Fabrikautomatisierung und Produktionsplanung.
Die Entwicklung von Systemen, die auf Betriebsebene in bestehende Technologien integriert werden können, erlaubt eine Verwendung von QPUs in Latenz- und determinismusabhängigen Szenarien. Durch den Fokus auf lokale Datenverarbeitung wird die Notwendigkeit vermieden, grundlegende Kenntnisse und Daten zur Produktionslaufzeit mit Dritten zu teilen. Ausgehend von der Annahme, dass geeignete maßgefertigte QPUs mittelfristig verfügbar sein werden, werden im Rahmen des Projektes Quantenalgorithmen zur Optimierung von Fertigungsaufgaben erforscht, die Integration des Quantencomputings in industrielle Prozesse betrachtet und die Technologie für Anwender ohne tiefe quantenmechanische und quanteninformatische Kenntnisse nutzbar gemacht.
Durch systematische Übertragung realer Problemstellungen aus der Industrie sollen die Vorteile von Quantenalgorithmen mit Vorteilen klassischer Algorithmen kombiniert und somit industriell verwertbare Anwendungsfälle erfolgreich gelöst werden. Eine perspektivische Erweiterung bisheriger Verfahren um Elemente, die heute nicht in der Planung berücksichtigt werden können, ergibt ein hohes Potenzial an Vorteilen in den Bereichen Wirtschaftlichkeit und Wettbewerbsfähigkeit im internationalen Vergleich.
VIRERO – VIrtual REmote RObotics for Radiometric Sorting

Innerhalb des Projektes werden Roboter- und radiologische Messtechnologien entwickelt, um teleoperiert als auch teilautonom radioaktive Reststoffe zu handhaben. Die Zielstellung der Technologieentwicklung reicht von der Zerlegung und Sortierung von Betriebsabfällen mit hoher Dosisleistung, wie Filterkerzen und Beutelfiltern, über die Nachkonditionierung verpackter radioaktiver Abfälle, bis zu einer radiologischen Sortierung für ein optimiertes Freigabeverfahren. Konventionelle Systeme weisen eine geringe Flexibilität bezüglich einer Adaption an unterschiedliche Einsatzbedingungen auf. Das Aufbrechen und Zerteilen verpackter Abfälle sowie der hochindividuelle Teilecharakter stellen diese Systeme vor Herausforderungen. Die Verwendung von Industrierobotern, innovativer Sensorik aus der Robotik und Kerntechnik sowie eine immersive, lernfähige Teleoperation birgt Potenzial die beschriebenen Herausforderungen zu lösen.
Projektziel ist die Erschließung einer adaptiven, aufgabengerechten Teleoperation für das kerntechnische Umfeld. Erforderlich hierfür sind die Entwicklung und Fusionierung einer radiologischen und räumlichen Charakterisierung. Autonome, mitlernende Systemfähigkeiten dienen dazu, sukzessiv die von Operatoren durchgeführten Aufgaben zu reduzieren.
Ein immersives und lernfähiges Teleoperationssystem, die räumliche Charakterisierung hochindividueller Handhabungsobjekte sowie
autonome Roboterfähigkeiten zur Handhabung und Sortierung der Abfallteile liegen im Forschungsfokus des Lehrstuhls FAPS.
| Projektträger: | PT GRS (Gesellschaft für Anlagen- und Reaktorsicherheit) |
| Förderkonzept: | FORKA (Forschung für den Rückbau kerntechnischer Anlagen) |
| Projektkennzeichen: | 15S9422C |