Index
Silicone Biomodels
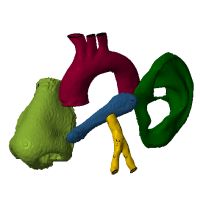
Der Aufbau des menschlichen Körpers ist durch seine vielen Freiformflächen, seine Asymmetrie und Anisotropie sehr komplex. Haptische Modelle, welche die Eigenschaften der anatomischen Strukturen wie die Geometrie, den inneren Aufbau oder das mechanische Verhalten abbilden, sind auf dem aktuellen Markt schwer und meist nur mit unzureichenden Eigenschaften zu finden. Zahlreiche Anwendungsmöglichkeiten für solche physikalische Modelle sind denkbar. Die Modelle können in der Ausbildung sowohl als Anschauungsmaterial als auch zu Übungszwecken verwendet werden. Des Weiteren sind Modelle, besonders von innenliegenden Strukturen, für die Patientenaufklärung geeignet. Mit patientenindividuellen Modellen könnten sich Chirurgen in der pre-operativen Planungsphase konkret auf den bevorstehenden Eingriff vorbereiten.
Die Modelle werden basierend auf realen Patientendaten erstellt. Hierzu werden virtuelle Modelle aus CT- und MRT-Daten mittels Segmentierung gewonnen. Die Segmentierung beschreibt hierbei die bildverarbeitende Vorgehensweise aus den Schichtdaten die für die Anwendung relevanten Strukturen von der gesamten Anatomie zu separieren. Diese Modelle können dann anschließend je nach Bedarf der Anwendung in unterschiedlichen Programmen (z.B. CAD) bearbeitet werden. Die digitalen Modelle werden abschließend mit der ACEO®-Technologie additiv aus Silikon gefertigt. Durch die Verwendung der Additiven Fertigungstechnik können auch komplexe Geometrien von anatomischen Strukturen abgebildet werden. Die Verwendung von Silikon ermöglicht dabei die Abbildung einiger materieller Eigenschaften der organischen Strukturen, wie beispielsweise die Elastizität, die Schneidbarkeit oder die Härte.
E|Flow: Energieeffiziente, vielseitige und autonome Transportfahrzeuge für den innerbetrieblichen Materialfluss

Im Rahmen des Forschungsprojekts E|Flow werden Lösungsansätze zu einem Cyber-Physischen-Materialflusssystem (CPMS) entwickelt. Ziel ist es, ein System mit kostengünstigen, flexiblen, autonomen und schwarmfähigen Transportfahrzeuge zu entwickeln, welches durch eine hohe Skalierbarkeit in einer stark wandelbaren Arbeitsumgebung eingesetzt werden kann. Weiterhin wird auf Grund der individuellen Durchführung und Routenplanung jedes einzelnen Transportauftrages die Energieeffizienz der intralogistischen Prozesse erhöht.
Der innovative Ansatz besteht darin, das Arbeitsumfeld mit Hilfe einer globalen, standardisierten und kostengünstigen Sensorik zu erfassen und den einzelnen Transporteinheiten als Weltmodell zur Verfügung zu stellen. Bei den Transportfahrzeugen kann somit auf eine aufwändige Erfassung der Umgebung verzichtet werden, wodurch sich sowohl der Preis jeder Einheit aber auch das Gesamtgewicht reduziert. Zudem kann auf Produktionsschwankung durch die Zu- oder Wegnahme von Einheiten schnell und einfach reagiert werden.
Weitere Informationen zur Green Factory Bavaria finden sie unter folgendem Link.
Weitere Informationen zum Forschungsprojekt E|Flow finden sie unter folgendem Link.
Absolutgenauigkeitssteigerung von Industrierobotern im Bereich der Strukturierung und Metallisierung dreidimensionaler Schaltungsträger
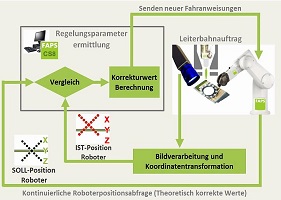
Hierzu kommt ein Hochgeschwindigkeitskamerasystem zum Einsatz, unter dessen Zuhilfenahme die tatsächliche Position und Bewegung des Substrats zur Prozesslaufzeit ermittelt werden soll. Die Ist-Bewegung des Substrats wird im Weiteren mit Informationen bezüglich der Soll-Bewegung abgeglichen und hieraus Korrekturwerte ermittelt, die während des Prozessablaufs in die Robotersteuerung integriert eine deutliche Genauigkeitssteigerung ermöglichen sollen. Neben einer hocheffizienten und genauen Bildverarbeitungsmethodik kommt bei diesem Ansatz auch einer entsprechenden Datenverarbeitung und schnellen Roboterregelung eine bedeutende Rolle zu. Zusätzlich wird im Rahmen des Projektes ein hochgenauer 3D Oberflächenscanner eingesetzt, der verwendet wird, um Lageabweichungen des Bauteils im Greifsystem und im Prozessraum zu ermitteln. Weiterführend ist es unter Nutzung der 3D-Bauteildaten dieses Systems auch denkbar, Abweichungen von der optimalen Bauteilform zu ermitteln und automatisiert angepasst auf das individuelle Bauteil Prozessparameter abzuleiten. Anhand der hohen Anforderungen der 3D-MID Technologie exemplarisch entwickelt, sollen die Projektergebnisse eine weiterreichende Methodik zur Genauigkeitssteigerung von Industrierobotern bei unterschiedlichen Applikationen bereitstellen.
Sensor-guided Jogging: Sensorbasierte Navigation für Sehbehinderte bei sportlichen Aktivitäten
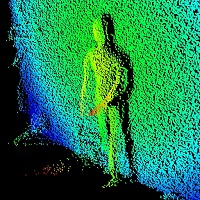
In Deutschland leben knapp 200.000 blinde und über 1 Million sehbehinderte Menschen. Die Möglichkeiten sich als Sehbehinderter oder Blinder sportlich zu betätigen, sind stark eingeschränkt. Traditionelle Hilfsmittel wie Blindenstock oder Blindenhund sind ebenso wie aktuell vorhandene technische Systeme, die zur Navigation beim Gehen abzielen, für die Anforderungen beim Laufen ungeeignet. Sehbehinderte oder blinde Jogger sind auf eine Begleitperson angewiesen, die ihnen über ein Seil, einen Stab oder Zurufe Richtungsanweisungen übermittelt. Ein gänzlich selbstbestimmtes Trainieren unabhängig von der Terminplanung und der Verfügbarkeit eines Guides ist somit nicht möglich. Zudem wird die Abhängigkeit von anderen Personen sowie die fehlende Möglichkeit, den Sport alleine auszuführen, von den betroffenen Personen zumeist als sehr einschränkend empfunden.
Im Transferprojekt „Sensor-guided Jogging“ des Interdisziplinären Zentrums für Eingebettete Systeme (ESI) wird ein eingebettetes Navigationssystem entwickelt, das es seinem sehbehinderten oder blinden Träger ermöglicht, gefahrlos seinen Laufweg in einer definierten Umgebung (z.B. auf einer Tartanbahn) zu verfolgen. Die mittels 3D-Sensorik erfassten Umgebungsinformationen müssen in Echtzeit ausgewertet werden, um erforderliche Weg- und Hindernisinformationen zu generieren. Diese werden über ein spezielles Feedback-System (Vibration/Warntöne) an den Jogger weitergegeben, sodass dieser jederzeit die aktuelle Umgebungssituation abschätzen kann.
Bionicum-Forschung: Entwicklung künstlicher Muskeln als Aktoren und Sensoren auf der Basis dielektrischer Elastomere

Im Rahmen der Forschungsarbeiten des neuen Bionikzentrums Bionicum-Forschung sollen, energiesparend herzustellende und zu betreibende Aktoren nach dem Vorbild natürlichen Muskelgewebes entwickelt und in Kinematiken mit mehreren Freiheitsgraden eingesetzt werden. Das Augenmerk soll auf dem Funktionsprinzip Dielektrischer-Elastomer-Aktoren (DEA) zum Aufbau einzelner Muskelzellen und auf deren Verkettung zu künstlichen Muskeln liegen.
Um das Ziel eines energieeffizienten und energiespeichernden sowie flexiblen und hochdynamischen Aktorsystems zu erreichen, müssen hauptsächlich Verfahren zur Herstellung der Muskelstapel, Mikrocontrollerschaltungen zur Ansteuerung der Stellglieder, eine leichtbauende Leistungselektronik und schließlich Simulations- und Regelungsmodelle für diese Aktoren und Kinematiken entwickelt werden. Die Forschungsarbeiten bilden langfristig die Basis für eine neue Generation robotischer Lösungen mit einem breiten Anwendungsspektrum von eigensicheren Servicerobotern über hochdynamische mobile Kinematiken bis hin zu bionischen Prothesen.
Zudem erschließt sich mit der zu entwickelnden Technologie die Möglichkeit, durch den Einsatz komplex verteilter Mikroaktoren, verschiedenste Bewegungsformen und physiologische Vorgänge von Lebewesen nachzubilden. Somit wird der Transfer von prinzipiellen Mechanismen auf technische Problemlösungen aus einem breiten Spektrum unterschiedlicher Lebensformen realisierbar.
Über weitere Projekte des Bionicum-Forschung sowie über das Ausstellungszentrum Bionicum-Ideenreich Natur informiert die Internetseite www.bionicum.de.
Spitzencluster: Absolutgenauigkeitssteigerung von medizinischen Positioniergeräten mittels optischer Messsysteme
Während es im industriellen Umfeld für die klassische Teach-In-Programmierung zumeist ausreicht einen wiederholgenauen Roboter einzusetzen, sind für die meisten Anwendungen in der Medizin Roboter erforderlich, die beliebige Positionen im Arbeitsraum absolutgenau anfahren können. Die klassischen Kalibriermethoden, bei denen das in der Steuerung abgelegte Robotermodell präzise beschrieben wird, stoßen jedoch insbesondere bei Anwendungen mit variierenden Roboterlasten schnell an ihre Grenzen.
Vor allem bei Patientenhandhabungsrobotern, deren elastische Verformungen in hohem Maße vom Gewicht und der Lage des Patienten auf der Liege abhängen, ist es anstrebenswert, die aktuelle Pose der Patientenliege direkt bestimmen zu können. Aus dieser Motivation heraus wurde ein kostengünstiges, kamerabasiertes Messsystem konzipiert und aufgebaut, mit dem die aktuelle Pose der Patientenliege ermittelt werden kann. Hierfür werden zwei Kameras so im Boden des Behandlungsraums installiert, dass sie nach oben auf eine an der Unterseite der Liege angebrachte Matrix aus Marken ausgerichtet sind. Durch stereoskopische Auswertung der Positionen von mindestens drei Marken kann schließlich die Pose der Liege in allen sechs Freiheitsgraden berechnet werden. Falls die geforderte Posegenauigkeit nicht erreicht wurde, werden die Roboterachsen nachgeregelt und eine erneute Kontrollmessung durchgeführt. Voruntersuchungen an einem Versuchsstand zeigten, dass die erzielbare Messgenauigkeit des Stereokamerasystems deutlich unter der geforderten Absolutgenauigkeit des Patientenhandhabungsgerätes von 0,5 mm liegt.
AsProMed: Assistenzsysteme für die Produktion und für Medizin-nahe Anwendungen
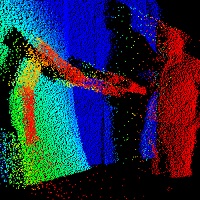
Das Forschungsprojekt AsProMed hat die Entwicklung von roboterbasierten Assistenzsystemen für verschiedene Bereiche der Produktion und für medizinnahe Anwendungen zum Ziel. Gesundheitlich vorgeschädigte bzw. leistungsgewandelte Personen sollen schneller wieder in den Beruf eingegliedert, leistungsgeminderte Personen ins Erwerbsleben integriert sowie arbeitsbedingte Erkrankungen durch eine Reduzierung von körperlichen Belastungen vermieden werden.Im Teilprojekt “Kollisionvermeidung” entwickelt der Lehrstuhl FAPS Strategien zur automatischen Bahnplanung und Kollisionsvermeidung des eingesetzten Roboterassistenten auf Basis einer Arbeitsraumerfassung und Objekterkennung mittels der 3D-PMD-Kameratechnologie.