Index
Universal Robots UR30 – Modelljahr 2025

| Spezifikationen | |
| Hersteller | Universal Robots |
| Typenbezeichnung | UR30 |
| Arbeitsradius | 1300 mm |
| Nutzlast | 30 kg |
| Grundfläche | Ø 245 mm |
| Eigengewicht | 63,5 kg |
| Freiheitsgrade | 6 rotierende Gelenke |
| Wiederholgenauigkeit gemäß ISO 9283 | ± 0,1 mm |
| Kommunikation | 500 Hz Steuerfrequenz
Modbus TCP PROFINET PROFIsafe Ethernet/IP USB 2.0, USB 3.0 ROS/ROS2 kompatibel |
Desktop 3D-Drucker Anycubic Photon Mono X
Technische Spezifikation
| Hersteller | Anycubic |
| Typ | Photon Mono X |
| Technologie | mSLA (maskenbasierte Stereolithographie) |
| Bauraum (B ∗ T ∗ H) | 192 mm ∗ 120 mm ∗ 245 mm |
| Material | Resine |
| Datenübertragung | USB |
| Schichtauflösung | min. 0,01 mm |
| Software | LycheeSlicer |
| Besonderheiten | Druckgeschwindigkeit max. 60 mm / h |
| Anwendungsbereiche | Rapid Prototyping |
Desktop 3D-Drucker Bambu Lab P1S

Technische Spezifikation
| Hersteller | Bambu Lab |
| Typ | 1PS |
| Technologie | FFF (Fused Filament Fabrication) |
| Bauraum (B ∗ T ∗ H) | 256 mm ∗ 256 mm ∗ 256 mm |
| Material | Kunststoff-Filamente mit Durchmesser 1,75 mm |
| Hotend | Edelstahl-Hotend |
| Max. Druckgeschwindigkeit |
500 mm/s |
| Extrudertyp | Direktantrieb |
| Besonderheiten | Abnehmbare Federstahlplatte; Beheizte Bauplattform; Geschlossene Baukammer |
| Anwendungsbereiche | Rapid Prototyping; mechanische End-Use-Bauteile |
Universal Robots UR3e – Modelljahr 2023

| Spezifikationen | |
| Hersteller | Universal Robots |
| Typenbezeichnung | UR3e |
| Arbeitsradius | 500 mm |
| Nutzlast | 3 kg |
| Grundfläche | Ø 128 mm |
| Eigengewicht | 11,2 kg |
| Freiheitsgrade | 6 rotierende Gelenke |
| Wiederholgenauigkeit gemäß ISO 9283 | ± 0,03 mm |
| Kommunikation | 500 Hz Steuerfrequenz Modbus TCP PROFINET Ethernet/IP USB 2.0, USB 3.0 |
MIRAI-UR Universal Robot Vision System
Das MIRAI Robotersteuerungssystem von Micropsi Industries ermöglicht die Automatisierung komplexer Bewegungsabläufe in dynamischen Prozessumgebungen durch handgeführtes Trainieren des Roboters. MIRAI ist ein, auf maschinellem Lernen basierter Controller zur Robotersteuerung, der über sensorischen Input (Kamerabild, Kraft-Drehmoment-Ablesungen, andere Sensoren) Roboterbewegungen generiert und damit in Echtzeit komplexe Aufgaben löst.

Die wichtigsten Merkmale
- KI-basierte Hand-Auge-Koordination für Roboter
- Besserer Umgang mit Varianzen im Werkstück und in der Bereitstellung
- Mehr Flexibilität für Ihre Anwendung
- keine Programmier- oder KI-Kenntnisse erforderlich
Fanuc CR-35iA Cobot

Technische Daten:
Traglast: 35 kg
Reichweite: 1813 mm
Freiheitsgrade: 6 rotierende Gelenke
Wiederholgenauigkeit: +/- 0.03 mm
Achsgeschwindigkeit: 750 mm/s (Kollaborativ)
Steuerung: R-30iB Plus
flanschmontierte Kraftmessdose: FS-40iA
Franklin Tester zur Bestimmung des Oberflächenisolationswiderstandes an weichmagnetischen Werkstoffen

Das Messsystem wurde im Rahmen des Forschungsprojektes EffiBlech von der Firma Brockhaus angeschafft, um den Oberflächenisolationswiderstand der Bleche zu bestimmen. Dadurch ist es möglich die Eigenschaften unterschiedlicher Isolationssysteme nach Norm zu bewerten und Optimierungen durchzuführen. Das Messsystem besteht aus einem mechanischen Messkopf, der Kontrolleinheit sowie der Messsoftware zur Auswertung der Messdaten.
Technische Spezifikationen:
| Hersteller: | Dr. Brockhaus Messtechnik GmbH & Co. KG |
| Systembezeichnung: | Franklin Tester FT 600 |
| Prüfnorm: | IEC 60404-11 und ASTM A717-93 |
| Probenabmessung | Mindestens 90 x 150 mm |
| Messung: | Messung des Gesamtstroms über 10 Messelektroden (zwischen 0 und 1 A) |
| Erzeugung Anpresskraft | Pneumatiksystem mit definierter Anpresskraft |
| Beschreibung: | Das Messsystem besteht aus zwei Bohrer, die eine elektrisch leitfähige Verbindung sicherstellen und 10 Messelektroden mit einer Gesamtfläche von 645 mm². Diese werden mit einer Druckkraft von 1.290 N auf die Isolation gedrückt, um die Wirksamkeit der Oberflächenisolation zu messen. |
Universal Robots UR5e – Modelljahr 2021
| Spezifikationen | |
| Hersteller | Universal Robots |
| Typenbezeichnung | UR5e |
| Arbeitsradius | 850 mm |
| Nutzlast | 5 kg |
| Grundfläche | Ø 149 mm |
| Eigengewicht | 20,6 kg |
| Freiheitsgrade | 6 rotierende Gelenke |
| Wiederholgenauigkeit gemäß ISO 9283 | ± 0,03 mm |
| Kommunikation | 500 Hz Steuerfrequenz Modbus TCP PROFINET Ethernet/IP USB 2.0, USB 3.0 |
Universal Robots UR16e – Modelljahr 2021

| Spezifikationen | |
| Hersteller | Universal Robots |
| Typenbezeichnung | UR16e |
| Arbeitsradius | 900 mm |
| Nutzlast | 16 kg |
| Grundfläche | Ø 190 mm |
| Eigengewicht | 33,0 kg |
| Freiheitsgrade | 6 rotierende Gelenke |
| Wiederholgenauigkeit gemäß ISO 9283 | ± 0,05 mm |
| Kommunikation | 500 Hz Steuerfrequenz Modbus TCP PROFINET Ethernet/IP USB 2.0, USB 3.0 |
Lessmüller OCT-System für das Laserschweißen
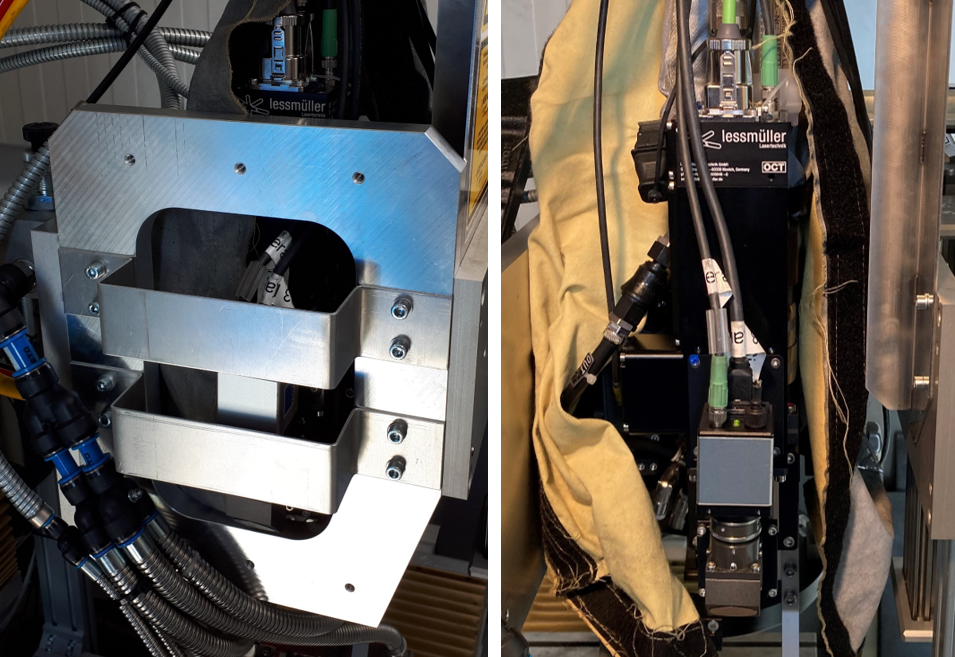
Im Rahmen des Forschungsprojekts KIKoSA wurde ein OCT-System der Fa. Lessmüller angeschafft und in die Fokussieroptik der lehrstuhleigenen Laserschweißzelle integriert. Die Optische Kohärenztomografie erweitert die Möglichkeiten zur Nahtführung, Echtzeit-Prozessüberwachung sowie Qualitätssicherung.
Das OCT-System setzt sich aus einem OCT-Scanner, einem OCT-Sensor sowie einem Industrie-PC (IPC) zusammen. Während der OCT-Scanner für die laterale Abtastung der Bauteiloberfläche sorgt, dient der OCT-Sensor der parallelen Tiefenmessung. Dadurch lassen sich 3D-Profile der Fügestelle sowohl vor als auch nach dem Schweißen gewinnen. Durch Tiefenmessungen während des Schweißens werden zudem Aussagen über die erreichte Einschweißtiefe möglich. Die Erfassung, Vorverarbeitung und Auswertung der Messdaten erfolgt auf einem gesonderten IPC.
Technische Spezifikationen:
| Typ | OCT 3D RMT |
| Scanner |
OCT SCANNER – Galvo-Scanner für Remote-Schweißoptiken |
| Sensor | OCT SENSOR MRB – Sender, Spektrometer, Empfänger des Systems mit motor. Referenzarm |
| IPC | OCT IPC – Industrie-PC inkl. Schnittstellen für Feldbus- und Büro-Kommunikation |
| Peripherie und Zubehör | OCT SUPCAB SV, PDC 2000, FIB 2000, CLINK GG 100, PDC 50FX, ModSet PFO33-255, ADAP-TRCAM, SUPCAB PD, CAN OCT-PFO 60, LabSet |
Weitere Informationen zum OCT-System finden Sie hier.