Index
Automatisierte Volumenerstellung aus 3D-Ultraschall-Punktwolken zur verbesserten Gewebedarstellung
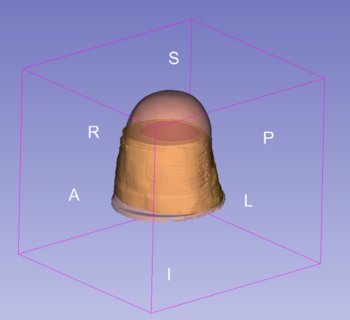
Im Rahmen des aktuellen Forschungsprojekts HapticScan liegen bereits 3D-rekonstruierte Ultraschalldaten in Form von Punktwolken vor. Diese stellen jedoch lediglich eine Rohfassung der Gewebestruktur dar und erlauben bislang keine weitergehende quantitative Analyse oder Visualisierung. Die automatisierte Erstellung volumetrischer Modelle aus diesen Punktwolken stellt daher einen entscheidenden nächsten Schritt dar, um die klinische Anwendbarkeit der Ultraschallrekonstruktionen deutlich zu verbessern.
Ziel dieser Arbeit ist die Entwicklung und Evaluierung eines Verfahrens zur Volumenerstellung aus bestehenden 3D-Ultraschall-Punktwolken. Dabei sollen verschiedene Algorithmen (z. B. voxelbasierte Rekonstruktion, Mesh-Generierung, Surface Reconstruction) implementiert und hinsichtlich Genauigkeit, Performance und Visualisierungsqualität verglichen werden.
Inhalte:
- Einarbeitung in Ultraschall, 3D-Punktwolkenverarbeitung und Volumenrekonstruktion
- Implementierung und Integration der Algorithmen in bestehende Workflows
- Evaluation der Ergebnisse in Bezug auf Genauigkeit und Rechenzeit
Voraussetzungen:
- Interesse an medizinischer Bildverarbeitung und 3D-Datenanalyse
- Programmierkenntnisse (Python, C++, MATLAB o. ä.)
- Erfahrung mit 3D-Visualisierungstools (z. B. Open3D, VTK) von Vorteil
- Selbständige und sorgfältige Arbeitsweise
Bewerbung: Interessierte Studierende senden ihre Bewerbung mit aktueller Notenübersicht und Lebenslauf per E-Mail.
Beginn: ab sofort
Vergleich moderner SLAM-Algorithmen zur präzisen Positionsbestimmung der Ultraschallsonde während dynamischer Ultraschallmessungen
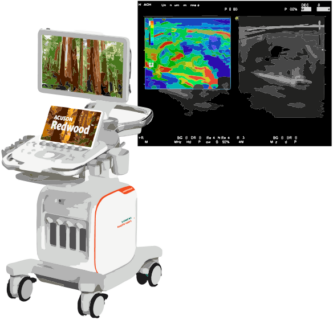
Die exakte Positions- und Lagebestimmung einer Ultraschallsonde ist entscheidend für die 3D-Rekonstruktion von Weichgewebe – z. B. zur digitalen Erfassung der Stumpfgeometrie bei der Prothesenversorgung. Um die derzeitige manuelle Palpation objektivierbar zu machen, wird in einem laufenden Forschungsprojekt ein System entwickelt, das elastographische Ultraschalldaten mit präzisen Trajektorieninformationen kombiniert.
Ziel dieser Arbeit ist es, aktuelle visuelle und visuell-inertiale SLAM-Verfahren (z. B. ORB-SLAM3, VINS-Fusion, RTAB-Map) im Kontext der Ultraschallbildgebung zu evaluieren. Dabei soll untersucht werden, welche Verfahren sich besonders gut für den klinischen Einsatz eignen – etwa im Hinblick auf Genauigkeit, Driftverhalten, Rechenlast und Echtzeitfähigkeit.
Inhalte:
- Einarbeitung in SLAM-Grundlagen und deren Anwendung in der medizinischen Bildgebung
- Auswahl und Implementierung aktueller SLAM-Algorithmen
- Aufbau eines Versuchsszenarios mit bewegter Ultraschallsonde (simuliert oder real)
- Vergleich der Verfahren anhand definierter Metriken (z. B. Pfadabweichung, Stabilität, Frame-Rate)
- Bewertung der Verfahren im Hinblick auf die spätere Nutzung zur 3D-Rekonstruktion
Voraussetzungen:
- Interesse an interdisziplinären Fragestellungen (Computer Vision, Medizintechnik, Robotik)
- Erste Erfahrungen mit Bildverarbeitung, Tracking oder SLAM von Vorteil
- Programmierkenntnisse in Python oder C++
- Erfahrung mit ROS, OpenCV oder SLAM-Frameworks wünschenswert
- Sorgfältige, strukturierte und analytische Arbeitsweise
Bewerbung: Interessierte Studierende senden ihre Bewerbung mit aktueller Notenübersicht und Lebenslauf per E-Mail.
Beginn: ab sofort
Entwicklung eines Echtzeit-Feedbacksystems zur Unterstützung standardisierter Ultraschallmessungen durch Benutzerfeedback
Eine präzise und systematische Durchführung von Ultraschallmessungen ist entscheidend für die Qualität der 3D-Rekonstruktion von Gewebestrukturen – z. B. zur objektiven Vermessung von Amputationsstümpfen für die Prothesenversorgung. Aktuell fehlen in der klinischen Praxis jedoch Mittel zur Rückmeldung über die Scanqualität oder Vollständigkeit während der Messung.
Ziel dieser Arbeit ist es, ein Echtzeit-Feedbacksystem zu entwickeln, das die Benutzer:innen bei der Durchführung von Ultraschallscans unterstützt, ohne ihren natürlichen Arbeitsfluss zu stören. Dabei soll untersucht werden, welche Arten von Feedback (z. B. akustisch, haptisch, visuell) in der Praxis realistisch und hilfreich sind.
Mögliche Feedbackansätze:
- Akustisches Feedback: z. B. Tonhöhe oder Sprachhinweise bei zu hoher Geschwindigkeit oder ungescannten Bereichen
- Haptisches Feedback: z. B. Vibrationsmotor am Griff bei Positionsfehlern oder Überspringen von Regionen
- Visuelles Feedback: z. B. kleine LED-Anzeigen, farblich codierte Rückmeldung oder minimales Tablet-Display in Blicknähe
Inhalte:
- Einarbeitung in relevante Themen (Ultraschall, Tracking, Human-Machine-Interaction)
- Auswahl und prototypische Umsetzung geeigneter Feedbackmethoden
- Entwicklung eines Feedbacksystems (Software und ggf. einfache Hardwarekomponenten)
- Echtzeit-Anbindung an Tracking- und Bilddaten
- Evaluation der Benutzerfreundlichkeit in typischen Scan-Szenarien
Voraussetzungen:
- Interesse an interdisziplinären Themen (Medizintechnik, UX-Design, Sensorik)
- Grundkenntnisse in GUI-/Systementwicklung (z. B. PyQt, Tkinter, ROS Rviz)
- Erste Erfahrungen in Echtzeitsystemen, Sensorverarbeitung oder Mikrocontroller von Vorteil
- Programmierkenntnisse (Python, C++ o. ä.)
- Sorgfältige, kreative und benutzerorientierte Arbeitsweise
Bewerbung: Interessierte Studierende senden ihre Bewerbung mit aktueller Notenübersicht und Lebenslauf per E-Mail.
Beginn: ab sofort
Untersuchung der Eignung einer Stereokamera zur gleichzeitigen 3D-Oberflächenerfassung und Echtzeit-Trajektorienbestimmung bei Ultraschallmessungen
Im Rahmen des Forschungsprojekts HapticScan zur Digitalisierung der Prothesenversorgung wird ein System entwickelt, das haptische Gewebedaten mittels Ultraschall-Elastographie erfasst und in ein dreidimensionales Modell überführt. Um diese Daten korrekt räumlich einordnen zu können, ist eine präzise Erfassung sowohl der Bewegung der Ultraschallsonde als auch der äußeren Geometrie des Beins erforderlich.
Stereokameras bieten die Möglichkeit, die Oberfläche eines Objekts als Punktwolke zu rekonstruieren und gleichzeitig die eigene Bewegung im Raum zu verfolgen – z. B. durch Integration moderner SLAM-Algorithmen.
Ziel der Arbeit ist die Analyse und prototypische Umsetzung eines Systems, das mithilfe einer Stereokamera sowohl eine 3D-Punktwolke der Umgebung aufnimmt als auch die Trajektorie der Sonde in Echtzeit verfolgt. Dabei sollen die Möglichkeiten und Grenzen der Kamera im diesem Kontext evaluiert werden.
Inhalte:
- Einarbeitung in die Hardware und Software der Intel RealSense D435i (Tiefenbild, IMU, Synchronisation)
- Einarbeitung in bestehende 3D-Erfassungs- und SLAM-Algorithmen (z. B. RealSense SDK, ORB-SLAM3, RTAB-Map)
- Konzeption und Aufbau eines Versuchsaufbaus zur gleichzeitigen Datenerfassung
- Untersuchung der Genauigkeit und Stabilität der erzeugten 3D-Modelle und der Bewegungsverfolgung
- Evaluierung der Eignung für die Kombination mit einem Ultraschallsystem
- Dokumentation von Herausforderungen, Grenzen und Optimierungsmöglichkeiten
Voraussetzungen:
- Interesse an Computer Vision, Sensorfusion und Medizintechnik
- Programmierkenntnisse in Python oder C++
- Erste Erfahrungen mit ROS und OpenCV von Vorteil
- Interesse an praktischer Arbeit mit Kameras und Sensoren
- Strukturierte und selbstständige Arbeitsweise
Bewerbung: Interessierte Studierende senden ihre Bewerbung mit aktueller Notenübersicht und Lebenslauf per E-Mail.
Beginn: ab sofort
Entwicklung eines Echtzeit-Lokalisierungssystems zur 3D-Rekonstruktion von Ultraschallmessungen
In Deutschland werden jährlich über 60.000 Amputationen durchgeführt – überwiegend an den unteren Extremitäten. Dies führt zu massiven Einschränkungen der Mobilität, weshalb viele Patient:innen auf Prothesen angewiesen sind. Die derzeitige Prothesenversorgung basiert auf manueller Palpation und Gipsabdruck, wodurch die Qualität stark von der subjektiven Einschätzung und Erfahrung der Orthopädietechniker:innen abhängt.
Im aktuellen Forschungsprojekt HapticScan wird ein neuartiges haptisches Scansystem entwickelt, das die manuelle Palpation digitalisiert und objektivierbar macht. Dabei werden elastographische Ultraschalldaten mit präzisen Positionsdaten kombiniert, um die Gewebestruktur dreidimensional zu rekonstruieren.
Im Rahmen dieser Arbeit soll ein System entwickelt werden, das in der Lage ist, die Position und Ausrichtung einer Ultraschallsonde während der Messung in Echtzeit zu erfassen. Die Lokalisierungsdaten sollen mit Bilddaten zur 3D-Rekonstruktion fusioniert werden. Moderne SLAM-Ansätze wie ORB-SLAM3 oder VINS-Fusion sollen zur präzisen Erfassung von Trajektorien und zur Echtzeitverarbeitung integriert und evaluiert werden.
Inhalte:
- Eigenständige Einarbeitung in relevante Grundlagen (Ultraschall, Elastographie, SLAM, Sensorfusion, Lokalisierung)
- Recherche zum Stand der Technik im Bereich Tracking und Echtzeit-3D-Rekonstruktion
- Konzeption und mechanische Integration der Kamera an der Ultraschallsonde
- Implementierung eines Echtzeit-Tracking-Systems (z. B. ORB-SLAM3 oder VINS-Fusion)
- Fusion der Trackingdaten mit Ultraschallinformationen zur 3D-Rekonstruktion des Gewebes
- Evaluation der Systemgenauigkeit und Echtzeitfähigkeit
Voraussetzungen:
- Interesse an interdisziplinären Themen (Medizintechnik, Robotik, Computer Vision)
- Erste Erfahrungen mit Sensortechnik, Bildverarbeitung oder SLAM-Verfahren
- Programmierkenntnisse in Python oder C++
- Erfahrung mit ROS, OpenCV oder ähnlichen Frameworks von Vorteil
- Sorgfältige, selbstständige und strukturierte Arbeitsweise
Bewerbung: Interessierte Studierende senden ihre Bewerbung mit aktueller Notenübersicht und Lebenslauf per E-Mail.
Beginn: ab sofort
Entwicklung eines Implantationswerkzeugs für ein Implantat zur Harninkontinenztherapie
Ausgangssituation und Aufgabenstellung
Belastungsharninkontinenz ist eine verbreitete Erkrankung, von der allein in Deutschland rund 3.000.000 Menschen betroffen sind. Bisherige künstliche Harnschließmuskel haben hohe Ausfallraten, erfordern einen invasiven Eingriff mit Krankenhausaufenthalt, sind unintuitiv zu bedienen und meist für Frauen ungeeignet, obwohl diese den Großteil der betroffenen Population darstellen.
Ein Start-up-Team aus Ärzten und Ingenieuren erforscht eine neuartige intraurethrale Sphinkterprothese. Das innovative Design ermöglicht eine intuitive Kontrolle der Miktion, während die Kontinenz bei Ereignissen wie Husten, Lachen oder dem Heben schwerer Gegenstände erhalten bleibt. Aufgrund der geringen Größe ist das Implantat sowohl für männliche als auch für weibliche Patienten geeignet und kann wenige Minuten nach einer minimalinvasiven ambulanten Implantation von den Patienten genutzt werden.
Im Rahmen der studentischen Arbeit soll ein Implantationswerkzeug für das Implantat entwickelt, prototypisch mittels 3D-Druck, Spritzguss und Silikonguss umgesetzt und in Zusammenarbeit mit Medizinern evaluiert werden.
Arbeitsschwerpunkte
- Konzeption des Implantationswerkzeugs in Zusammenarbeit mit dem Team
- Strukturierte Recherche zum Stand der Technik
- Erstellung des Designs mit Autodesk Inventor
- Prototypische Umsetzung des Implantationswerkzeugs
- Evaluation der Funktionalität und der Usability in Zusammenarbeit mit Medizinern
Vorkenntnisse
- Kreative, lösungsorientierte und eigenständige Arbeitsweise
- Interesse an der Entwicklung Medizinprodukten & Implantaten
- Vorkenntnisse in Methoden der Produktentwicklung und im Umgang mit CAD-Programmen
- Spaß an praktischer Arbeit und Prototypenbau
- Motivation sich neue Kenntnisse im Bereich der Medizinprodukteentwicklung anzueignen
Hinweise zur Bewerbung
- Beginn ist jederzeit möglich
- Bewerbungen bitte per Email mit aktueller Notenübersicht und Lebenslauf
- Weitere Informationen auf Anfrage per Mail
Implementierung des Visibility Index für einen autonomen Rollstuhl

Motivation
Die Technologien der mobilen Robotik ermöglichen neue Assistenzsysteme zur Unterstützung der Mobilität und Orientierung. Dazu gehören sowohl das am FAPS entwickelte Assistenzsystem für Blinde als auch der am FAPS entwickelte intelligente Rollstuhl.
Bei der Personennavigation steht der Komfort für die unterstützte Person im Vordergrund. Dazu müssen Komfortfaktoren sowohl für den Passagier als auch für umstehende Personen berücksichtigt werden. Ein Aspekt ist die Sichtbarkeit der Umgebung bei der Wegplanung, auch Visibility Index genannt. Im Rahmen dieser Arbeit soll dieser Visibility Index in einem Costmap Layer für die Navigation mittels NAV2 implementiert und mit einem realen autonomen Rollstuhl getestet werden.
Ziele und Arbeitsschritte
- Einarbeitung in ROS
- Einarbeitung in das Themenfeld der Personennavigation
- Implementierung eines Visibility Layers für NAV2
- Durchführung von Experimenten
Benefits
- Hands-on experience in der Entwicklung im Bereich Medizintechnik und Robotik
- Austausch mit anderen Studierenden am FAPS
- Einblicke in weitere Forschungsbereiche
- Anwendungsbezogene Arbeit für den Berufseinstieg
- Flexible Arbeitsweise
Hinweise zur Bewerbung
- Grundlegende Programmierkenntnisse sollten vorhanden sein
- Vorkenntnisse in ROS von Vorteil, aber nicht zwingend notwendig
- Beginn ist jederzeit möglich
- Bewerbungen bitte per E-Mail mit aktueller Notenübersicht und Lebenslauf
- Weitere Informationen auf Anfrage per Mail oder gerne im persönlichen Gespräch
Messung des Passagierkomforts mittels Beschleunigung und EKG eines autonomen Rollstuhls
Motivation
Technologien der mobilen Robotik ermöglichen neue Assistenzsysteme zur Unterstützung der Mobilität von betroffenen Personen. Bei der Personennavigation steht der Komfort für die Person im Vordergrund. Dazu müssen Komfortfaktoren sowohl für den Passagier als auch für umstehende Personen berücksichtigt werden.
Im Rahmen dieser Arbeit soll ein prototypischer Versuchsaufbau mit IMU und/oder EKG am Rollstuhl realisiert werden, um den Zusammenhang zwischen Beschleunigung sowie Vitaldaten und dem Passagierkomfort experimentell zu untersuchen. Dazu sollen im Rahmen dieser Arbeit reale Nutzerstudien mit einem autonomen Rollstuhl in unserem Labor durchgeführt werden.
Ziele und Arbeitsschritte
- Einarbeitung in ROS
- Einarbeitung in das Themenfeld der Personennavigation
- Implementierung des Versuch Aufbaus
- Durchführen von Probandenstudien
Benefits
- Hands-on experience in der Entwicklung im Bereich Medizintechnik und Robotik
- Austausch mit anderen Studierenden am FAPS
- Einblicke in weitere Forschungsbereiche
- Anwendungsbezogene Arbeit für den Berufseinstieg
- Flexible Arbeitsweise
Hinweise zur Bewerbung
- Grundlegende Programmierkenntnisse sollten vorhanden sein
- Beginn ist jederzeit möglich
- Bewerbungen bitte per E-Mail mit aktueller Notenübersicht und Lebenslauf
- Weitere Informationen auf Anfrage per Mail oder gerne im persönlichen Gespräch
Geteilte Navigation eines intelligenten Rollstuhls mittels EMG-Signalen
Motivation
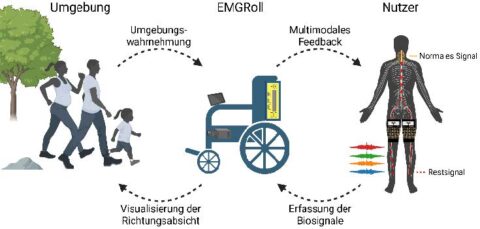
Mobilitätseinschränkungen haben weitreichende Folgen für den Alltag der Betroffenen und führen neben der körperlichen Einschränkung häufig auch zu psychischen Problemen. Der Rollstuhl stellt für die Betroffenen die einzige Möglichkeit dar, am täglichen Leben teilzunehmen. Aufgrund von Funktionseinschränkungen der oberen Extremitäten, z.B. durch eine Querschnittlähmung, sind jedoch nicht alle Menschen mit Behinderung in der Lage, einen klassischen oder elektrischen Rollstuhl selbstständig zu bedienen.
Ziel des Projektes EMGRoll ist die Entwicklung eines Sensor-Kits, das durch die Kombination von Elektromyographie und Umgebungssensorik eine intuitive Steuerung von elektrisch angetriebenen Rollstühlen ermöglicht. In Zusammenarbeit mit n-squared Lab wird dazu eine EMG-Schnittstelle zu einem intelligenten Rollstuhl erforscht. Am FAPS wird dazu eine geteilte Navigation entwickelt, um die Bewegungssignale intelligent an die Umgebung anzupassen. Dies soll eine intuitive und sichere Steuerung des Rollstuhls auch bei körperlichen Einschränkungen der Betroffenen ermöglichen.
Zielstellung
Ziel dieser Arbeit ist die Entwicklung und Implementierung einer geteilten Navigation (Shared Control) für Personenassistenzsysteme am Beispiel des Blindenassistenzsystems und eines intelligenten Rollstuhls. Darüber hinaus sind weitere Themen auf Anfrage verfügbar.
Die Arbeit beinhaltet folgende Schwerpunkte:
- Evaluation des aktuellen Stands der Technik der geteilten Navigation (Shared Control)
- Einarbeitung in das Robot Operating System ROS2
- Weiterentwicklung einer geteilten Navigation in ROS2
- Durchführen von Nutzerstudien.
Hinweise / Anforderungen
Grundlegende Kenntnisse oder die Motivation sich in die Programmierung robotischer Systeme einzuarbeiten sollten vorhanden sein. Das Softwaremodul soll in ROS umgesetzt werden, daher sind Vorkenntnisse in C++ oder Python und ROS von Vorteil, allerdings nicht zwangsläufig erforderlich. Der Umfang und die Zielsetzung ist entsprechend der Vorkenntnisse anpassbar.
Der FAPS bietet ein breites Spektrum an Möglichkeiten sich im Bereich Medizintechnik und Robotik auszuprobieren. Studenten bekommen die Gelegenheit mit verschiedenster Hardware und Software zu arbeiten. Die Arbeitsweise ist flexibel und für ein studentisches Umfeld mit Vernetzungsmöglichkeiten wird gesorgt.
Weitere Infos auf Anfrage. Bewerbungen bitte per E-Mail mit aktueller Notenübersicht und Lebenslauf.
Pfadplanung unter Berücksichtigung von sozialer Akzeptanz und Passagierkomfort für einen intelligenten Rollstuhl
Motivation
Die Technologien der mobilen Robotik ermöglichen neue Assistenzsysteme zur Unterstützung der Mobilität und Orientierung. Dazu gehören sowohl das am FAPS entwickelte Assistenzsystem für Blinde als auch der am FAPS entwickelte intelligente Rollstuhl. Für solche Systeme können aktuelle Algorithmen der Roboternavigation genutzt werden. Bisherige Ansätze zur sozialen Navigation berücksichtigen nur Komfortfaktoren von Personen in der Umgebung des Roboters, nicht aber die Komfortfaktoren des Passagiers selbst. Dieses Problem soll am FAPS erforscht werden. Weitere Informationen finden Sie in dieser Veröffentlichung.
Für die soziale Navigation unter Berücksichtigung von Personen für mobile Roboter stehen verschiedene Simulations- und Navigationsansätze zur Verfügung. Im Rahmen dieser Arbeit sollen Algorithmen getestet und hinsichtlich des Nutzerkomforts bewertet werden. Darauf aufbauend soll eine Weiterentwicklung implementiert werden, um den Komfort für den Passagier zu erhöhen. Mögliche Lösungsansätze stellen Planner basierend auf dem Social Force Model oder Reinforcement Learning dar.
Ziele und Arbeitsschritte
- Einarbeitung in ROS
- Einarbeitung in das Themenfeld der Personennavigation
- Literaturrecherche zu bestehenden Navigationsansätzen
- Einarbeitung in die Simulationsumgebung HuNavSim
- Bewertung bestehender sozial akzeptierten Navigationsalgorithmen hinsichtlich des Passagierkomforts
- Implementierung neuer Lösungsansätze
Benefits
- Hands-on experience in der Entwicklung im Bereich Medizintechnik und Robotik
- Austausch mit anderen Studierenden am FAPS
- Einblicke in weitere Forschungsbereiche
- Anwendungsbezogene Arbeit für den Berufseinstieg
- Flexible Arbeitsweise
Hinweise zur Bewerbung
- Grundlegende Programmierkenntnisse sollten vorhanden sein
- Beginn ist jederzeit möglich
- Bewerbungen bitte per E-Mail mit aktueller Notenübersicht und Lebenslauf
- Weitere Informationen auf Anfrage per Mail oder gerne im persönlichen Gespräch