Index
BA/PA/MA: Analyse und Modellierung der chemischen Vernetzung von 2K-Silikon
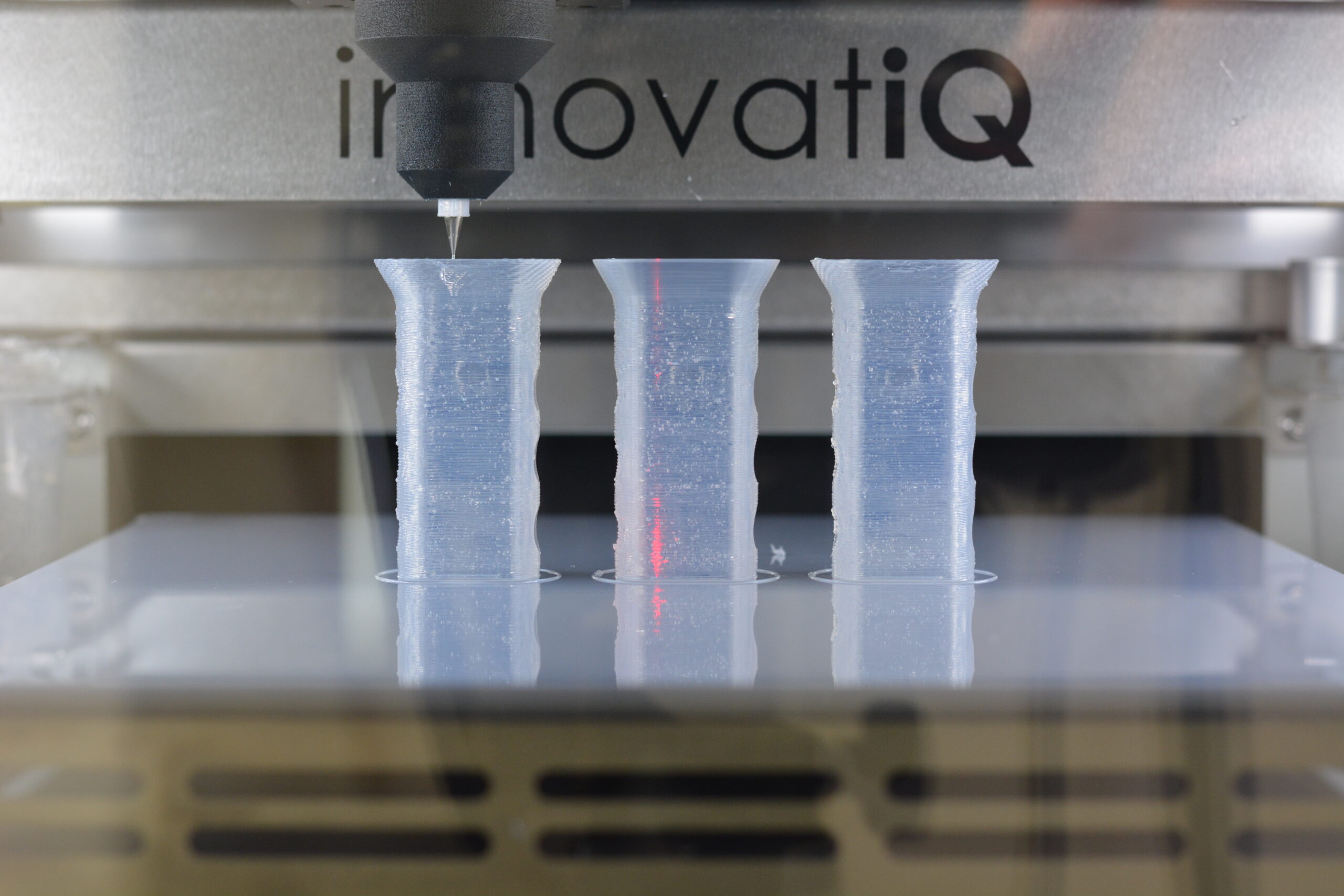
Sowohl im Maschinenbau als auch in der Medizintechnik finden Silikonbauteile aufgrund ihrer besonderen Materialeigenschaften, wie Temperaturstabilität, Biokompatibilität und Flexibilität, breite Anwendung. Zur individualisierten Herstellung von Silikonbauteilen werden bisher hauptsächlich aufwendige indirekte Gussverfahren genutzt. Neuartige additive Verfahren, der direkte Silikondruck, besitzen das Potenzial, die Fertigung zu vereinfachen, komplexe Geometrien zu ermöglichen und eine wirtschaftliche Produktion ab Losgröße eins umzusetzen. Am Lehrstuhl FAPS werden die innovativen Verfahren Direct Ink Writing (DIW) und Liquid Additive Manufacturing (LAM) für die Herstellung von Silikonbauteilen eingesetzt und erforscht.
Im Rahmen dieser studentischen Arbeit wird das Vernetzungsverhalten von 2K Silikonkautschuk charakterisiert, analysiert und modelliert. Dafür werden DSC- und Rheometrie-Messdaten bereinigt und aufbereitet. Die Daten werden danach grafisch aufbereitet und ermöglichen die Ermittlung von Materialkennwerten.
Diese Arbeit bietet die Möglichkeit, in ein aktuelles und fortschrittliches Forschungsgebiet im Schnittpunkt zwischen Materialwissenschaft und Maschinenbau einzutauchen und den Einsatz von modernen Technologien in der Fertigung kennenzulernen. Eigene Ideen können umgesetzt und in der Praxis angewendet werden.


Aufgaben:
- Literaturrecherche zum Stand der Forschung in der Datenerfassung und -aufbereitung
- Aufbereitung und Analyse von Versuchsdaten
- Übertragung der Ergebnisse auf ein Vernetzungsmodell
- Modellvalidierung über Materialcharakterisierungsversuche
- Dokumentation und Präsentation der Ergebnisse
Vorkenntnisse:
- Studium im Bereich Maschinenbau/Mechatronik/Medizintechnik/Elektrotechnik oder ähnliches
- Vorerfahrung im Bereich der Datenverarbeitung in Origin wünschenswert
- Interesse an der additiven Fertigung und Materialwissenschaften
- Sehr engagierte, selbstständige und zuverlässige Arbeitsweise
Bewerbungen mit Lebenslauf, Notenspiegel und sehr knappem Motivationsschreiben (maximal 80 Wörter) bitte über das Anfrageformular oder an Lukas.Gugel@faps.fau.de
BA/PA/MA: Entwicklung einer echtzeitfähigen XAI-Methodik für das autonome Fahren
Ausgangssituation:
Moderne mobile Arbeitsmaschinen stellen durch hohe Antriebsleistungen und Einsatzgewichte besondere Anforderungen an eine sichere und robuste Automatisierungstechnik. Die langjährige Analyse physikalischer Effekte auf mechatronische Komponenten ermöglicht den Einsatz vielfältiger Sensorsysteme zur Erfassung von Umgebungsinformationen. Die Verarbeitung dieser umfangreichen Datenmengen erfolgt zunehmend durch künstliche neuronale Netze. Allerdings stehen aktuelle Technologien vor der Herausforderung, diese Netze robust, sicher und effizient zu gestalten.

Aufgabenschwerpunkte:
-
Einarbeitung in den Stand der Technik zu autonomen mobilen Systemen und künstlicher Intelligenz
-
Untersuchung und Evaluierung von bestehende Methoden zur Steigerung von Robustheit und Transparenz
- Entwicklung einer echtzeitfähigen & leistungsfähigen Methodik
-
Nutzung von Tools und Frameworks zur Umsetzung dieser Methodik in einem mobilen Robotersystem (ROS2, PyTorch)
-
Statistische Auswertung der Ergebnisse anhand branchenüblicher Metriken
-
Strukturierte Dokumentation und Präsentation der Ergebnisse
Vorkenntnisse:
- Interesse an autonomen Fahrzeugen und neuronalen Netzen
- Interesse an Datenauswertung und KI-Architekturen
- Grundlegende Programmierkenntnisse in Python, C++ und ROS2 von Vorteil
- Sehr gute Deutsch- und Englisch-Kenntnisse
Der Arbeitsumfang kann entsprechend der Art der Abschlussarbeit angepasst werden.
Bewerbungen ausschließlich per E-Mail mit aussagekräftigen Unterlagen (Lebenslauf, vollständige Notenübersicht)
[BA/PA/MA] Potentialalyse zum Gleichstrombetrieb einer Wellpappenanlage

Anlagen zur Herstellung von Wellpappe verfügen über eine Vielzahl von drehzahlsynchronisierten elektrischen Antrieben.
Im Stand der Technik erfolgt die Energieversorgung und Ansteuerung über Umrichter, welche Energie aus dem Wechselstromnetz beziehen und überschüssige Energie in Bremswiderständen in Wärme umwandeln.
Durch die Umstellung auf Gleichstrom (DC) in Produktionsanlagen können erhebliche Vorteile erzielt werden, insbesondere in Bezug auf Energieeffizienz, Materialersparnis und Systemstabilität. DC-basierte Systeme ermöglichen eine flexiblere Energienutzung, höhere Wirkungsgrade und ermöglichen die Rückspeisung vom Bremsenergie (Rekuperation).
Ziel der Arbeit:
Im Rahmen der Arbeit sollen die Energie- und Materialeinsparpotenziale durch den Einsatz eines DC-Netzes mit zentralem DC-Bus zur Versorgung der drehzahlvariablen Antriebe einer Maschine zur Herstellung von Wellpappe evaluiert werden. Die Möglichkeit zur Nutzung von Bremsenergie durch Rekuperation soll geprüft werden.
Arbeitspakete:
- Analyse des Ist-Zustands: Besichtigung einer Anlage beim Industriepartner und sammeln der nötigen Daten aus den Technischen Dokumentationen, Einführung in den DC-Demonstrator am FAPS, Einlesen in die Fachliteratur
- Konzeption einer DC-Maschine: Auswahl geeigneter DC-fähiger Umrichter, Auslegung des DC-Netzes; Analyse der Lastprofile der Motoren zur Evaluation des Einsatzes von Rekuperation
- Bewertung der Einsparpotenziale: Quantifizierung der Energiesparpotenziale auf Basis von Literatur oder eigener Laborversuche, Identifikation und Quantifizierung der Materialeinsparpotenziale
Anforderungen:
- Kenntnisse in Elektrotechnik, idealerweise mit Bezug zur DC-Technologie und Energieeffizienz in Produktionsumgebungen von Vorteil
- Selbstständige und strukturierte Arbeitsweise
- Gute Deutsch- und Englischkenntnisse in Wort und Schrift
Induktives Laden: Konzeption und Entwicklung von Prozessen zur automatisierten Produktion induktiver Energieübertragungssysteme (BA/PA/MA)

Ausgangslage:
Mit der fortschreitenden Elektrifizierung der Fahrzeuge steigt auch die Nachfrage nach komfortablen, sicheren und in den Alltag integrierbaren Lademöglichkeiten. Kontaktlose Energieübertragungssysteme ermöglichen Szenarien wie „Road Charging“ und „Opportunity Charging“. Weitere Vorteile sind ein gesteigerter Ladekomfort für den Anwender sowie eine geringere Angriffsfläche für Vandalismus. Folglich ist für die nächsten Jahre eine gesteigerte Nachfrage nach induktiven Energieübertragungssystemen für Elektromobile zu erwarten. Allerdings stehen bislang keine Verfahren zur Verfügung, die eine wirtschaftliche Fertigung induktiver Energieübertragungssysteme in hoher Stückzahl ermöglichen.
Mögliche Aufgabenstellung
Verlegen, Kontaktieren und Isolieren sind die drei wichtigsten Schritte zur Herstellung eines induktiven Energieübertragungssystems. Die Verfahren sollen durch geeignete Maßnahmen für die industrielle Fertigung befähigt werden. Neben praktischen Versuchen ist auch der prototypische Aufbau von Demonstratoren vorgesehen. Mögliche Aufgabenstellungen können sein:
- Einarbeiten in die Technologien für die kontaktlose Energieübertragung
- Analyse von verschiedenen Systemaufbauten der Marktbegleiter
- Adaption bestehender Konzepte aus dem Elektromaschinenbau auf den neuen Anwendungskontext
- Entwicklung und Konzeption geeigneter Vorrichtungen und Aufbau von Demonstratorsystemen
Hinweise und Bewerbung:
- Bearbeitung der Aufgaben im studentischem Team
- Strukturierte und selbstständige Arbeitsweise
- Bewerbungen bitte per E-Mail mit Lebenslauf und aktueller Fächerübersicht an info@seamless-energy.com
Ansprechpartner:
Maximilian Kneidl
Maximilian Kneidl, M.Sc. info@seamless-energy.com

Abschlussarbeit zu autonomen Drohnen

Drohnen werden in unterschiedlichsten Gebieten der Industrie eingesetzt, unter anderem zum Materialtransport in der Intralogistik oder zur Erfassung digitaler Lagebilder.
Für den effizienten und sicheren Einsatz ist es wünschenswert, dass die Drohnen ihre Aufgaben selbstständig erledigen, also autonom agieren. Durch den autonomen Betrieb wird es möglich mithilfe geeigneter Navigation die Drohnen beispielsweise hinsichtlich ihres Energieverbrauchs zu optimieren. Hierfür ist die Erforschung robotischer Infrastrukturen (Robot Operating System 2), Computer-Vision, neuartiger KI-Modelle und Reinforcement Learning erforderlich. Zudem sind Hardwareaspekte, wie ein stabiler Aufbau des Flugroboters sowie die Ausstattung mit entsprechender Sensorik zu beachten.
Am Flugfeld des Lehrstuhl FAPS sind verschiedene Themen für Bachelor- und Masterarbeiten in den oben genannten Bereichen zu vergeben. Voraussetzung ist die Motivation zur selbständigen Einarbeitung in die Programmierung von Flugrobotern. Weitere Informationen erhalten Sie auf Anfrage per E-Mail.
Hinweise zur Bewerbung
- Freude an der Programmierung
- Interesse am Robot Operating System
- Gute Englischkenntnisse erforderlich
- Sehr gute Deutscherkenntnisse erforderlich (mind. C1)
- Selbstständige Arbeitsweise
- Beginn jederzeit möglich
- Bewerbungen bitte per E-Mail mit aktueller Notenübersicht und Lebenslauf
- Bitte beachten Sie, dass unvollständige Bewerbungen nicht berücksichtigt werden
BA/PA/MA: Potential-Analysen zu aktuellen Technologien im Bereichen Quantencomputing
Ausgangssituation und Beschreibung
Quantencomputing ist ein aufstrebendes Forschungsfeld und die Zukunft des Computing. Es gibt mehrere Themenfelder, in denen Quantencomputer sinnvoll eingesetzt werden können.
Quantencomputer haben den Vorteil, dass sie hochdimensionale bzw. komplexe Kalkulationen sehr schnell lösen können. Diese hohe Rechenleistung kann sinnvoll bei z.B. Optimierungsproblemen, Simulationen, Machine Learning und mehr eingesetzt werden. Es sind allerdings nicht nur Forschungsarbeiten im Bereich des Quantencomputing an sich möglich, sondern auch in der Analyse der Verbesserung der Anwendbarkeit für den Endbenutzer (z.B. LLM) und auch die Analyse der Vorteile gegenüber klassischen Computern (z.B. Energieverbrauch) möglich.
Dieser Forschungsrahmen soll im Rahmen verschiedener Abschlussarbeiten (BA/PA/MA) vertieft werden. Die genaue thematische Ausrichtung der Arbeiten wird nach einer kurzen Einarbeitungsphase festgelegt und orientiert sich an der Anwendung von Quantenalgorithmen in der Simulation, z. B. bei Optimierungsproblemen oder Materialmodellierungen. Geben Sie bitte bei der Bewerbung begründet an, welches Themenfeld Ihnen am meisten zuspricht. Es ist prinzipiell möglich den Anteil zwischen theoretischer Analyse und Programmiertätigkeiten anzupassen, bitte geben Sie auch hier Ihre präferierte Aufteilung mit an.
Themenfelder
- Material Discovery/Simulation
- Machine Learning
- Fully Quantum
- Hybrid Quantum
- Quantum Accelerated
- LLM Promptengineering und Retraining
- Quantum Annealing
- Error corrected hardware/algorithms
- Energy consumption of quantum computing
Vorkenntnisse und Anforderungen
- sehr gute Deutsch- oder Englischkenntnisse
- selbstständige Arbeitsweise
- Erfahrung mit Literaturrecherchen
- gute Programmierkenntnisse in Python
- (optional aber Vorteilhaft) Vorkenntnisse zum Thema Quantencomputing, Materialwissenschaft oder Simulation
Bewerbung
Bitte senden Sie Ihre aussagekräftigen Unterlagen (Lebenslauf und vollständige Notenübersicht) per E-Mail ein.
Induktives Laden: Konzeption und Entwicklung von Prozessen zur automatisierten Produktion induktiver Energieübertragungssysteme (BA/PA/MA)

Ausgangslage:
Mit der fortschreitenden Elektrifizierung der Fahrzeuge steigt auch die Nachfrage nach komfortablen, sicheren und in den Alltag integrierbaren Lademöglichkeiten. Kontaktlose Energieübertragungssysteme ermöglichen Szenarien wie „Road Charging“ und „Opportunity Charging“. Weitere Vorteile sind ein gesteigerter Ladekomfort für den Anwender sowie eine geringere Angriffsfläche für Vandalismus. Folglich ist für die nächsten Jahre eine gesteigerte Nachfrage nach induktiven Energieübertragungssystemen für Elektromobile zu erwarten. Allerdings stehen bislang keine Verfahren zur Verfügung, die eine wirtschaftliche Fertigung induktiver Energieübertragungssysteme in hoher Stückzahl ermöglichen.
Mögliche Aufgabenstellung
Verlegen, Kontaktieren und Isolieren sind die drei wichtigsten Schritte zur Herstellung eines induktiven Energieübertragungssystems. Die Verfahren sollen durch geeignete Maßnahmen für die industrielle Fertigung befähigt werden. Neben praktischen Versuchen ist auch der prototypische Aufbau von Demonstratoren vorgesehen. Mögliche Aufgabenstellungen können sein:
- Einarbeiten in die Technologien für die kontaktlose Energieübertragung
- Analyse von verschiedenen Systemaufbauten der Marktbegleiter
- Adaption bestehender Konzepte aus dem Elektromaschinenbau auf den neuen Anwendungskontext
- Entwicklung und Konzeption geeigneter Vorrichtungen und Aufbau von Demonstratorsystemen
Hinweise und Bewerbung:
- Bearbeitung der Aufgaben im studentischem Team
- Strukturierte und selbstständige Arbeitsweise
- Bewerbungen bitte per E-Mail mit Lebenslauf und aktueller Fächerübersicht an info@seamless-energy.com
Ansprechpartner:
Maximilian Kneidl
Maximilian Kneidl, M.Sc. info@seamless-energy.com
BA/PA/MA: Nutzung von Quantenalgorithmen zur Unterstützung der (Material-)Simulation
Ausgangssituation und Beschreibung
In den Ingenieur- und Materialwissenschaften spielt die Nutzung von Simulationen als digitaler Zwilling eine zentrale Rolle. Mit zunehmender Systemkomplexität stoßen klassische Rechnerarchitekturen jedoch an ihre Leistungsgrenzen.
Quantenalgorithmen können hier neue Wege eröffnen. Durch ihre grundlegend andere Art, Rechenprobleme zu bearbeiten, ermöglichen sie innovative Ansätze für die Simulation hochkomplexer Systeme. Ziel ist es daher, das Potenzial quantenbasierter Verfahren zur Unterstützung und Erweiterung klassischer Simulationsmethoden zu untersuchen.
Dieser Forschungsrahmen soll im Rahmen verschiedener Abschlussarbeiten (BA/PA/MA) vertieft werden. Die genaue thematische Ausrichtung der Arbeiten wird nach einer kurzen Einarbeitungsphase festgelegt und orientiert sich an der Anwendung von Quantenalgorithmen in der Simulation, z. B. bei Optimierungsproblemen oder Materialmodellierungen.
Vorkenntnisse und Anforderungen
- sehr gute Deutsch- oder Englischkenntnisse
- selbstständige Arbeitsweise
- Erfahrung mit Literaturrecherchen
- gute Programmierkenntnisse in Python
- (optional aber Vorteilhaft) Vorkenntnisse zum Thema Quantencomputing, Materialwissenschaft oder Simulation
Bewerbung
Bitte senden Sie Ihre aussagekräftigen Unterlagen (Lebenslauf und vollständige Notenübersicht) per E-Mail ein.
[BA/PA/MA] Lösung kombinatorischer Optimierungsprobleme in flexiblen Fertigungsanlagen durch Verfahren des maschinellen Lernens
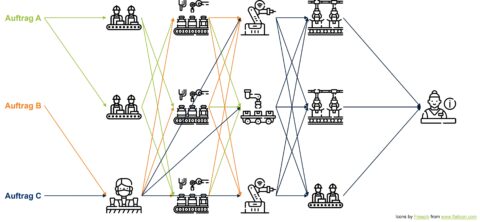
Die Anforderungen an Fertigungsanlagen entwickeln sich zunehmend in Richtung Flexibilisierung und Personalisierung fort, um individuellen Kundenwünschen gerecht zu werden. In diesem Kontext gewinnt das Flexible Job-Shop Scheduling Problem an Bedeutung: Es beschreibt die Herausforderung, verschiedene Aufträge mit mehreren Arbeitsschritten auf wechselnde Maschinen so zu planen, dass alle Schritte in möglichst optimaler Reihenfolge bearbeitet werden. Im Gegensatz zu starren Systemen können einzelne Arbeitsschritte dabei auf unterschiedlichen Maschinen ausgeführt werden. Ziel ist es, die Produktionszeit zu minimieren und die Nutzung der Maschinen optimal zu gestalten, um den komplexen Anforderungen moderner Fertigung gerecht zu werden.
Da es sich beim Flexible Job-Shop Scheduling Problem um ein kombinatorisches Optimierungsproblem handelt, das in Abhängigkeit der Größe der Produktionsanlage sehr komplex werden kann, bietet sich für eine dynamische Lösungsfindung die Methodik des Multi-Agent Reinforcement Learnings (MARL) an.
Ziel dieser Arbeit ist es, ein Scheduling Problem einer simulierten Produktionsanlage durch Entwicklung und Training eines Muli-Agent Reinforcement Learning Systems zu lösen.
Deine Aufgaben:
- Einarbeitung in den Stand der Technik zum Lösen des Flexibel Job-Shop Scheduling Problems und MARL
- Mathematische Beschreibung des Problems
- Erstellung einer Simulation einer Fertigungsanlage als Trainingsumgebung
- Konzeptionierung eines MARL-Systems
- Umsetzung und Training des MARL-Systems
- Validierung des Systems als flexiblen Scheduler
Dein Profil:
- Fortgeschrittene Programmierkenntnisse
- Affinität für maschinelles Lernen und dessen Anwendung in der Produktion
- Strukturierte, selbstständige Arbeitsweise
- Sicherer Umgang mit Deutsch und Englisch in Wort und Schrift
Voraussetzungen:
Für diese Arbeit werden ein sicherer Umgang mit Python sowie Vorerfahrungen im Trainieren von RL-Modellen vorausgesetzt. Bitte stellt in eurer Bewerbung dar, wie ihr diese Voraussetzungen erfüllt.
Die Arbeit kann ab sofort bearbeitet werden. Bewerbung bitte per Mail an untenstehenden Kontakt richten und Lebenslauf sowie aktuellen Notenauszug anfügen.
It’s Clusterin’ Time! Realisierung eines Mixed-SBC-Clusters für die Edge (BA/PA/MA)
Der Einsatz von Edge Computing gewinnt in vielen Bereichen an Bedeutung, da er die Datenverarbeitung näher an den Ort der Datenentstehtung verlagert. Ein Mixed-SBC-Cluster, der verschiedene Single Board Computer (SBC) wie Nvidia Jetson und Raspberry Pi umfasst, bietet eine ausgezeichnete Plattform, um die Herausforderungen und Möglichkeiten des Edge Computings zu erproben und zu demonstrieren.
Ziel ist die Entwicklung eines Mixed-SBC-Clusters für die Edge, der als experimentelle Plattform in industrienaher Forschung und für Lehrzwecke im Automatisierungsumfeld dient. Dieser Cluster soll die Heterogenität realer IT-Infrastrukturen widerspiegeln und das Sammeln praktischer Erfahrungen mit Cluster-Management, verteilten Speichersystemen und der Integration von Erweiterungsmodulen (z.B. Funkmodul, Neural Processing Unit und Field Programmable Gate Array) eröffnen.
(Mögliche) Schwerpunkte der Arbeit:
- Aufbau und Konfiguration eines heterogenen SBC-Clusters für Edge Computing Szenarien.
- Einsatz eines Cluster-Management-Systems und Implementierung eines Service Mesh.
- Einsatz von Automatisierungswerkzeugen und Infrastruktur-as-Code (IaC) zur effizienten Verwaltung und Konfiguration.
- Implementierung eines Lifecycle-Managements des Betriebs bestehend aus Monitoring, Sicherung, Wartung und Aktualisierung.
- Integration von Storage-Lösungen und spezifischen Erweiterungsmodulen für verschiedene Anwendungsfälle.
- Integration in Anwendungsfälle der Automatisierungstechnik in industriellen Produktionsanlagen, der Gebäudeautomatisierung und insbesondere des Energiemanagements.
- Beitrag zum Transfer in die Lehre als Praktikumsversuch oder Übungseinheit
Wenn die ausgeschriebene Arbeit noch online ist, dann ist sie auch noch aktuell. Sollten Sie Interesse an der Arbeit haben, so kommen Sie bitte mittels einer E-Mail und einem kurzen Essay (ein One Pager genügt) auf mich zu. Sollten Sie eine intrinsische Motivation für ein angrenzendes oder ähnlichen Thema haben, so stellen Sie in Ihrer Anfrage bitte den Bezug zu meiner Ausschreibung dar.
Bitte stellen Sie die komplette Anfrage in deutscher Sprache, auch wenn Sie die Ausarbeitung in Englisch verfassen werden wird. Hintergrund ist, dass Sie sich in laufende Forschungsprojekte einbringen sowie mit den Projektpartnern (auch kleinere und mittelständische Unternehmen) austauschen können sollen und von diesen wird mehrheitlich eine Kommunikation auf Deutsch gewünscht.
Weitere Informationen erhalten Sie auf Anfrage, der Arbeitsumfang kann entsprechend der Arbeit angepasst werden und die Bearbeitung weitestgehend im Home-Office stattfinden.