Index
BA/PA/MA: Analyse und Modellierung der chemischen Vernetzung von 2K-Silikon
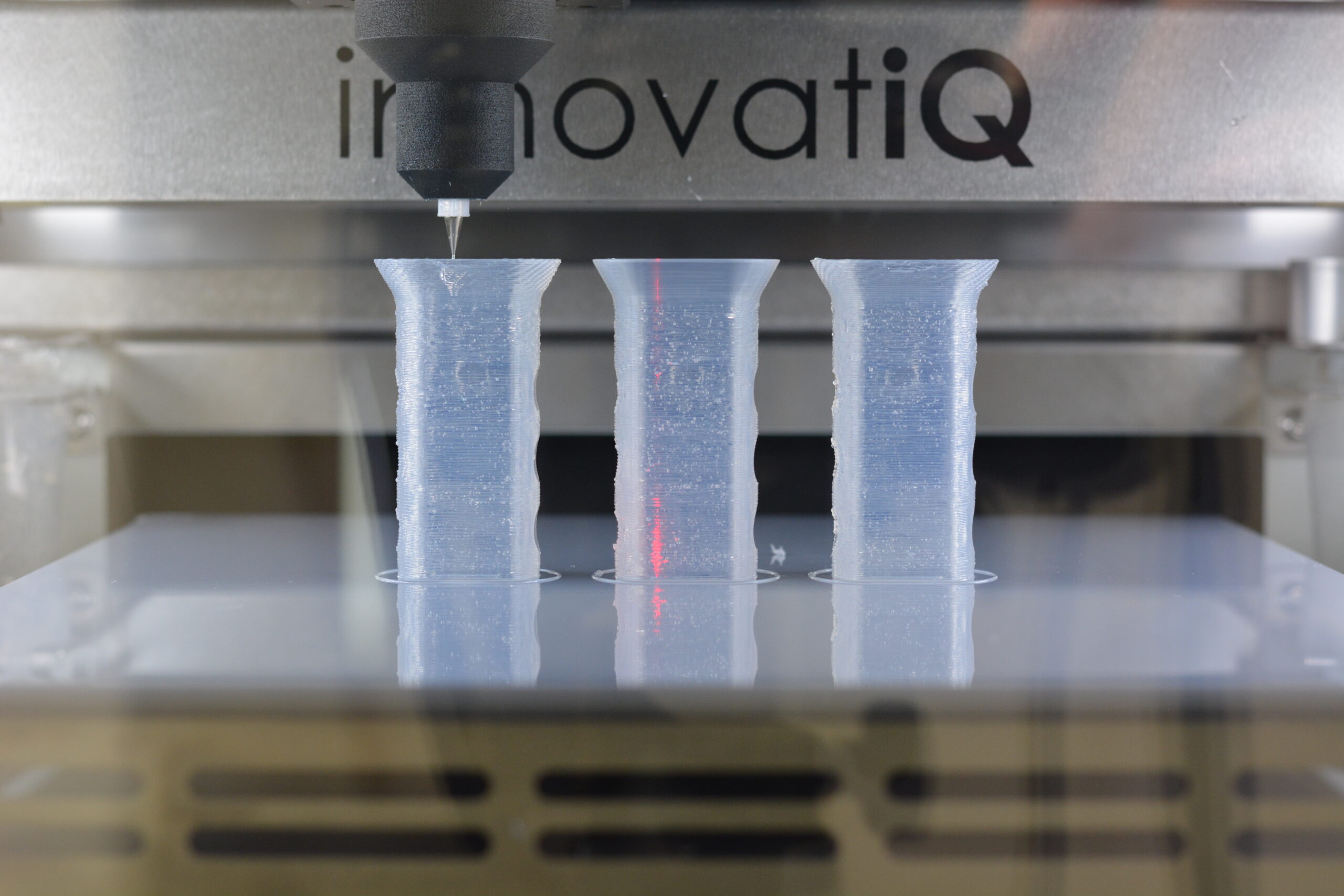
Sowohl im Maschinenbau als auch in der Medizintechnik finden Silikonbauteile aufgrund ihrer besonderen Materialeigenschaften, wie Temperaturstabilität, Biokompatibilität und Flexibilität, breite Anwendung. Zur individualisierten Herstellung von Silikonbauteilen werden bisher hauptsächlich aufwendige indirekte Gussverfahren genutzt. Neuartige additive Verfahren, der direkte Silikondruck, besitzen das Potenzial, die Fertigung zu vereinfachen, komplexe Geometrien zu ermöglichen und eine wirtschaftliche Produktion ab Losgröße eins umzusetzen. Am Lehrstuhl FAPS werden die innovativen Verfahren Direct Ink Writing (DIW) und Liquid Additive Manufacturing (LAM) für die Herstellung von Silikonbauteilen eingesetzt und erforscht.
Im Rahmen dieser studentischen Arbeit wird das Vernetzungsverhalten von 2K Silikonkautschuk charakterisiert, analysiert und modelliert. Dafür werden DSC- und Rheometrie-Messdaten bereinigt und aufbereitet. Die Daten werden danach grafisch aufbereitet und ermöglichen die Ermittlung von Materialkennwerten.
Diese Arbeit bietet die Möglichkeit, in ein aktuelles und fortschrittliches Forschungsgebiet im Schnittpunkt zwischen Materialwissenschaft und Maschinenbau einzutauchen und den Einsatz von modernen Technologien in der Fertigung kennenzulernen. Eigene Ideen können umgesetzt und in der Praxis angewendet werden.


Aufgaben:
- Literaturrecherche zum Stand der Forschung in der Datenerfassung und -aufbereitung
- Aufbereitung und Analyse von Versuchsdaten
- Übertragung der Ergebnisse auf ein Vernetzungsmodell
- Modellvalidierung über Materialcharakterisierungsversuche
- Dokumentation und Präsentation der Ergebnisse
Vorkenntnisse:
- Studium im Bereich Maschinenbau/Mechatronik/Medizintechnik/Elektrotechnik oder ähnliches
- Vorerfahrung im Bereich der Datenverarbeitung in Origin wünschenswert
- Interesse an der additiven Fertigung und Materialwissenschaften
- Sehr engagierte, selbstständige und zuverlässige Arbeitsweise
Bewerbungen mit Lebenslauf, Notenspiegel und sehr knappem Motivationsschreiben (maximal 80 Wörter) bitte über das Anfrageformular oder an Lukas.Gugel@faps.fau.de
BA/PA/MA: Entwicklung einer echtzeitfähigen XAI-Methodik für das autonome Fahren
Ausgangssituation:
Moderne mobile Arbeitsmaschinen stellen durch hohe Antriebsleistungen und Einsatzgewichte besondere Anforderungen an eine sichere und robuste Automatisierungstechnik. Die langjährige Analyse physikalischer Effekte auf mechatronische Komponenten ermöglicht den Einsatz vielfältiger Sensorsysteme zur Erfassung von Umgebungsinformationen. Die Verarbeitung dieser umfangreichen Datenmengen erfolgt zunehmend durch künstliche neuronale Netze. Allerdings stehen aktuelle Technologien vor der Herausforderung, diese Netze robust, sicher und effizient zu gestalten.

Aufgabenschwerpunkte:
-
Einarbeitung in den Stand der Technik zu autonomen mobilen Systemen und künstlicher Intelligenz
-
Untersuchung und Evaluierung von bestehende Methoden zur Steigerung von Robustheit und Transparenz
- Entwicklung einer echtzeitfähigen & leistungsfähigen Methodik
-
Nutzung von Tools und Frameworks zur Umsetzung dieser Methodik in einem mobilen Robotersystem (ROS2, PyTorch)
-
Statistische Auswertung der Ergebnisse anhand branchenüblicher Metriken
-
Strukturierte Dokumentation und Präsentation der Ergebnisse
Vorkenntnisse:
- Interesse an autonomen Fahrzeugen und neuronalen Netzen
- Interesse an Datenauswertung und KI-Architekturen
- Grundlegende Programmierkenntnisse in Python, C++ und ROS2 von Vorteil
- Sehr gute Deutsch- und Englisch-Kenntnisse
Der Arbeitsumfang kann entsprechend der Art der Abschlussarbeit angepasst werden.
Bewerbungen ausschließlich per E-Mail mit aussagekräftigen Unterlagen (Lebenslauf, vollständige Notenübersicht)
Induktives Laden: Konzeption und Entwicklung von Prozessen zur automatisierten Produktion induktiver Energieübertragungssysteme (BA/PA/MA)

Ausgangslage:
Mit der fortschreitenden Elektrifizierung der Fahrzeuge steigt auch die Nachfrage nach komfortablen, sicheren und in den Alltag integrierbaren Lademöglichkeiten. Kontaktlose Energieübertragungssysteme ermöglichen Szenarien wie „Road Charging“ und „Opportunity Charging“. Weitere Vorteile sind ein gesteigerter Ladekomfort für den Anwender sowie eine geringere Angriffsfläche für Vandalismus. Folglich ist für die nächsten Jahre eine gesteigerte Nachfrage nach induktiven Energieübertragungssystemen für Elektromobile zu erwarten. Allerdings stehen bislang keine Verfahren zur Verfügung, die eine wirtschaftliche Fertigung induktiver Energieübertragungssysteme in hoher Stückzahl ermöglichen.
Mögliche Aufgabenstellung
Verlegen, Kontaktieren und Isolieren sind die drei wichtigsten Schritte zur Herstellung eines induktiven Energieübertragungssystems. Die Verfahren sollen durch geeignete Maßnahmen für die industrielle Fertigung befähigt werden. Neben praktischen Versuchen ist auch der prototypische Aufbau von Demonstratoren vorgesehen. Mögliche Aufgabenstellungen können sein:
- Einarbeiten in die Technologien für die kontaktlose Energieübertragung
- Analyse von verschiedenen Systemaufbauten der Marktbegleiter
- Adaption bestehender Konzepte aus dem Elektromaschinenbau auf den neuen Anwendungskontext
- Entwicklung und Konzeption geeigneter Vorrichtungen und Aufbau von Demonstratorsystemen
Hinweise und Bewerbung:
- Bearbeitung der Aufgaben im studentischem Team
- Strukturierte und selbstständige Arbeitsweise
- Bewerbungen bitte per E-Mail mit Lebenslauf und aktueller Fächerübersicht an info@seamless-energy.com
Ansprechpartner:
Maximilian Kneidl
Maximilian Kneidl, M.Sc. info@seamless-energy.com

BA/PA/MA: Potential-Analysen zu aktuellen Technologien im Bereichen Quantencomputing
Ausgangssituation und Beschreibung
Quantencomputing ist ein aufstrebendes Forschungsfeld und die Zukunft des Computing. Es gibt mehrere Themenfelder, in denen Quantencomputer sinnvoll eingesetzt werden können.
Quantencomputer haben den Vorteil, dass sie hochdimensionale bzw. komplexe Kalkulationen sehr schnell lösen können. Diese hohe Rechenleistung kann sinnvoll bei z.B. Optimierungsproblemen, Simulationen, Machine Learning und mehr eingesetzt werden. Es sind allerdings nicht nur Forschungsarbeiten im Bereich des Quantencomputing an sich möglich, sondern auch in der Analyse der Verbesserung der Anwendbarkeit für den Endbenutzer (z.B. LLM) und auch die Analyse der Vorteile gegenüber klassischen Computern (z.B. Energieverbrauch) möglich.
Dieser Forschungsrahmen soll im Rahmen verschiedener Abschlussarbeiten (BA/PA/MA) vertieft werden. Die genaue thematische Ausrichtung der Arbeiten wird nach einer kurzen Einarbeitungsphase festgelegt und orientiert sich an der Anwendung von Quantenalgorithmen in der Simulation, z. B. bei Optimierungsproblemen oder Materialmodellierungen. Geben Sie bitte bei der Bewerbung begründet an, welches Themenfeld Ihnen am meisten zuspricht. Es ist prinzipiell möglich den Anteil zwischen theoretischer Analyse und Programmiertätigkeiten anzupassen, bitte geben Sie auch hier Ihre präferierte Aufteilung mit an.
Themenfelder
- Material Discovery/Simulation
- Machine Learning
- Fully Quantum
- Hybrid Quantum
- Quantum Accelerated
- LLM Promptengineering und Retraining
- Quantum Annealing
- Error corrected hardware/algorithms
- Energy consumption of quantum computing
Vorkenntnisse und Anforderungen
- sehr gute Deutsch- oder Englischkenntnisse
- selbstständige Arbeitsweise
- Erfahrung mit Literaturrecherchen
- gute Programmierkenntnisse in Python
- (optional aber Vorteilhaft) Vorkenntnisse zum Thema Quantencomputing, Materialwissenschaft oder Simulation
Bewerbung
Bitte senden Sie Ihre aussagekräftigen Unterlagen (Lebenslauf und vollständige Notenübersicht) per E-Mail ein.
BA/PA/MA: Nutzung von Quantenalgorithmen zur Unterstützung der (Material-)Simulation
Ausgangssituation und Beschreibung
In den Ingenieur- und Materialwissenschaften spielt die Nutzung von Simulationen als digitaler Zwilling eine zentrale Rolle. Mit zunehmender Systemkomplexität stoßen klassische Rechnerarchitekturen jedoch an ihre Leistungsgrenzen.
Quantenalgorithmen können hier neue Wege eröffnen. Durch ihre grundlegend andere Art, Rechenprobleme zu bearbeiten, ermöglichen sie innovative Ansätze für die Simulation hochkomplexer Systeme. Ziel ist es daher, das Potenzial quantenbasierter Verfahren zur Unterstützung und Erweiterung klassischer Simulationsmethoden zu untersuchen.
Dieser Forschungsrahmen soll im Rahmen verschiedener Abschlussarbeiten (BA/PA/MA) vertieft werden. Die genaue thematische Ausrichtung der Arbeiten wird nach einer kurzen Einarbeitungsphase festgelegt und orientiert sich an der Anwendung von Quantenalgorithmen in der Simulation, z. B. bei Optimierungsproblemen oder Materialmodellierungen.
Vorkenntnisse und Anforderungen
- sehr gute Deutsch- oder Englischkenntnisse
- selbstständige Arbeitsweise
- Erfahrung mit Literaturrecherchen
- gute Programmierkenntnisse in Python
- (optional aber Vorteilhaft) Vorkenntnisse zum Thema Quantencomputing, Materialwissenschaft oder Simulation
Bewerbung
Bitte senden Sie Ihre aussagekräftigen Unterlagen (Lebenslauf und vollständige Notenübersicht) per E-Mail ein.
It’s Clusterin’ Time! Realisierung eines Mixed-SBC-Clusters für die Edge (BA/PA/MA)
Der Einsatz von Edge Computing gewinnt in vielen Bereichen an Bedeutung, da er die Datenverarbeitung näher an den Ort der Datenentstehtung verlagert. Ein Mixed-SBC-Cluster, der verschiedene Single Board Computer (SBC) wie Nvidia Jetson und Raspberry Pi umfasst, bietet eine ausgezeichnete Plattform, um die Herausforderungen und Möglichkeiten des Edge Computings zu erproben und zu demonstrieren.
Ziel ist die Entwicklung eines Mixed-SBC-Clusters für die Edge, der als experimentelle Plattform in industrienaher Forschung und für Lehrzwecke im Automatisierungsumfeld dient. Dieser Cluster soll die Heterogenität realer IT-Infrastrukturen widerspiegeln und das Sammeln praktischer Erfahrungen mit Cluster-Management, verteilten Speichersystemen und der Integration von Erweiterungsmodulen (z.B. Funkmodul, Neural Processing Unit und Field Programmable Gate Array) eröffnen.
(Mögliche) Schwerpunkte der Arbeit:
- Aufbau und Konfiguration eines heterogenen SBC-Clusters für Edge Computing Szenarien.
- Einsatz eines Cluster-Management-Systems und Implementierung eines Service Mesh.
- Einsatz von Automatisierungswerkzeugen und Infrastruktur-as-Code (IaC) zur effizienten Verwaltung und Konfiguration.
- Implementierung eines Lifecycle-Managements des Betriebs bestehend aus Monitoring, Sicherung, Wartung und Aktualisierung.
- Integration von Storage-Lösungen und spezifischen Erweiterungsmodulen für verschiedene Anwendungsfälle.
- Integration in Anwendungsfälle der Automatisierungstechnik in industriellen Produktionsanlagen, der Gebäudeautomatisierung und insbesondere des Energiemanagements.
- Beitrag zum Transfer in die Lehre als Praktikumsversuch oder Übungseinheit
Wenn die ausgeschriebene Arbeit noch online ist, dann ist sie auch noch aktuell. Sollten Sie Interesse an der Arbeit haben, so kommen Sie bitte mittels einer E-Mail und einem kurzen Essay (ein One Pager genügt) auf mich zu. Sollten Sie eine intrinsische Motivation für ein angrenzendes oder ähnlichen Thema haben, so stellen Sie in Ihrer Anfrage bitte den Bezug zu meiner Ausschreibung dar.
Bitte stellen Sie die komplette Anfrage in deutscher Sprache, auch wenn Sie die Ausarbeitung in Englisch verfassen werden wird. Hintergrund ist, dass Sie sich in laufende Forschungsprojekte einbringen sowie mit den Projektpartnern (auch kleinere und mittelständische Unternehmen) austauschen können sollen und von diesen wird mehrheitlich eine Kommunikation auf Deutsch gewünscht.
Weitere Informationen erhalten Sie auf Anfrage, der Arbeitsumfang kann entsprechend der Arbeit angepasst werden und die Bearbeitung weitestgehend im Home-Office stattfinden.
Smart Manufacturing: Erprobung und Weiterentwicklung der Messtechnik und des Regelungskonzepts beim Richten von Flachdraht für Hairpin-Statoren [BA/PA/MA]

Inmitten des wachsenden Spektrums elektrischer Antriebstechnologien, wie dem inzwischen etablierten Hairpin-Motor und aufstrebenden Varianten wie Continuous Hairpin, Hairpins aus Hohlleitern oder Litzen und Axialflussmaschinen, steht das Richten von Flachdraht als zentraler Prozessschritt im Fokus. Die gegenwärtige Herausforderung im industriellen Umfeld liegt in der Steuerung dieses Prozesses, der bisher auf statischen Parametern und dem empirischen Wissen von Facharbeitern basiert und Schwankungen im Eingangsmaterial nur unzureichend berücksichtigt.
Mögliche Aufgabenstellungen:
Im Rahmen aktueller Forschungsaktivitäten am Lehrstuhl FAPS soll der Prozessschritt des Richtens von Flachdraht durch die Erforschung und Implementierung inlinefähiger Sensorik zur Erfassung von Wechselwirkungen im Prozess sowie innovativer Regelungsansätze revolutioniert werden. Auf diese Weise soll die Qualität in der Hairpin-Produktion effektiv und effizient gesteigert und ein wichtiger Beitrag zur Weiterentwicklung neuer Trends in der Automobilindustrie geleistet werden.
Mögliche Themengebiete:
- Planung und Konstruktion von Anlagenkomponenten
- Erforschung neuer Messmethoden
- Implementierung und Validierung von Messsystemen
- Planung und Durchführung von experimentellen Untersuchungen
- KI-gestützte Analyse und Interpretation experimenteller Daten
- Modellierung und Simulation der Produktionsprozesse
Detaillierte Informationen zu den möglichen Themengebieten und deren Aufgabenstellungen werden gerne in einem persönlichen Gespräch erläutert.
Anforderungsprofil:
- Interesse an der Produktion elektrischer Traktionsantriebe
- Je nach Themengebiet: Grundkenntnisse in Konstruktion, Messtechnik, Werkstoffkunde, Programmierung, Datenanalyse (KI/ML) oder Regelungstechnik
- Freude an praktischer Arbeit wie z.B. Durchführung und Auswertung von Versuchsreihen oder Aufbau von Messtechnik
- Analytisches Denkvermögen sowie selbstständige, gewissenhafte und strukturierte Arbeitsweise
- Teamfähigkeit und Kommunikationsstärke
- Gute Deutsch- und Englischkenntnisse in Wort und Schrift
Bewerbung per E-Mail mit Lebenslauf, aktuellem Notenspiegel und Angabe des bevorzugten Themengebietes an anja.preitschaft@faps.fau.de
Simulation der Formgebung im Rahmen der Herstellung von endlosen Nutauskleidungen (BA/PA/MA)
Aufgabenstellung:
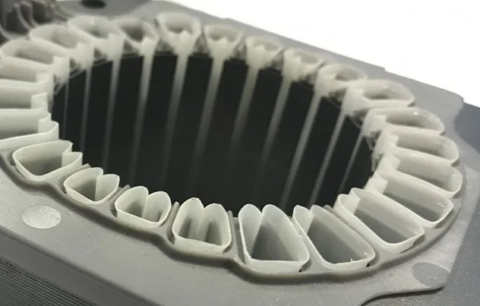
Im Kontext der Elektromotorenfertigung für schienengebunden Fahrzeuge haben sich diverse Motorkonzepte etabliert, welche vorwiegend auf massiveren Flachleitern beruhen. Deren Handhabung und Einbringung stellt auf Grund ihrer großen Biegesteifigkeit, gepaart mit der erforderlichen Formgebung, eine große Herausforderung dar. Auf Grund vergleichsweise geringen Stückzahlen sind gegenwärtig einige Prozessschritte manuelle gelöst. Deren Automatisierung stellt eine große Herausforderung innerhalb der Transformation der Mobilität im 21. Jahrhundert dar.
Ziel dieser studentischen Arbeit ist es, simulativ zu untersuchen, wie eine geeignete Stempel- oder Klingengeometrie aussehen muss, um möglichst kraftfrei, aber gleichzeitig auch präzise und sauber, kalandriertes Isolationspapier zu perforieren und zu schneiden. Dabei sollen vorwiegend Prozesskräfte und -momente ermittelt und geometrische Empfehlung für den Werkzeugbau ausgesprochen werden.
Die Arbeit beinhaltet folgende Schwerpunkte:
- Einarbeitung in die Statorfertigung für Schienenfahrzeuge
- Eigenheiten der Wicklungsmontage
- Prozess der Wickelkopfformung
- Simulative Abbildung des Status Quo im Formgebungsprozess
- Stator
- Isolationspapier
- Krafteinbringung durch Formgebungswerkzeug
- Krafteinbringung durch Perforationsklingen
- Analyse der Einflüsse
- Identifikation von Potentialen
- Ableitung von Prozessänderungen
- Simulative Validierung
- Simulative Gesamtabbildung des verbesserten Prozesses
Persönliche Voraussetzungen:
- Interesse an Fertigungsprozessen im Bereich Elektromaschinen
- Grundlegende Kenntnisse der Funktionsweise und des Aufbaus eines E-Motors
- Konstruktives Geschick (CAD)
- Erfahrungen mit Simulation
- Eigenständige Arbeitsweise
- Deutsch und Englisch in Wort und Schrift
Der Beginn kann ab sofort erfolgen. Eine grundlegende Vorarbeit ist vorhanden.
Weitere Informationen und Details sind beim genannten Mitarbeiter erhältlich. Eine Bearbeitung ist ab sofort möglich. Bewerbungen senden Sie bitte mit Notenauszug und Lebenslauf per E-Mail oder über das Anfrageformular. Wir werden zeitnah rückmelden.
Untersuchung von Schneidengeometrien und -materialien im Zusammenspiel mit faserverstärkten Isolationspapieren (BA/PA/MA)
Aufgabenstellung:
Im Kontext der Elektromotorenfertigung für schienengebunden Fahrzeuge haben sich diverse Motorkonzepte etabliert, welche vorwiegend auf massiveren Flachleitern beruhen. Deren Handhabung und Einbringung stellt auf Grund ihrer großen Biegesteifigkeit, gepaart mit der erforderlichen Formgebung, eine große Herausforderung dar. Auf Grund vergleichsweise geringen Stückzahlen sind gegenwärtig einige Prozessschritte manuelle gelöst. Deren Automatisierung stellt eine große Herausforderung innerhalb der Transformation der Mobilität im 21. Jahrhundert dar.
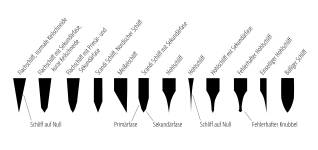
Ziel dieser studentischen Arbeit ist es, zu ermitteln, welche Schneidengeometrie und welcher Schneidenwerkstoff sich zur Bearbeitung von faserverstärktem Isolationspapier eignen. Dabei muss auch die Kalandrierung des Papiers berücksichtigt werden. Die Schneiden müssen primär in Richtung der Kalandrierung, aber auch normal dazu das Papier sauber und prozesssicher trennen können.
Die Arbeit beinhaltet folgende Schwerpunkte:
- Einarbeitung in den Statorfertigung für Schienenfahrzeuge
- Fertigungsprozess Stator
- Zusammenspiel des statorseitigen Isolationssystems
- Zweck und Funktion der Nutgrundisolation
- Konzeptentwürfe für Teillösungen
- Untersuchungen verschiedener Schneidenwerkstoffe
- Untersuchung verschiedener Schneidengeometrien
- Aufnahme von Kraft/Wege-Kurven mittels Prüfmaschinen
- Überführung der Erkenntnisse in ein geeignetes Werkzeug
- Untersuchung der Prozesseignung von gängigen Isolationspapieren
- Validierung der eigenen Entwicklungen
- Implementierung in den Versuchsaufbau
- Funktionsnachweis
- Automatisierungsnachweis
Persönliche Voraussetzungen:
- Interesse an Fertigungsprozessen im Bereich Elektromaschinen
- Interesse an 6σ-Methoden/Statistik
- Grundlegende Kenntnisse der Funktionsweise und des Aufbaus eines E-Motors
- Konstruktives Geschick (CAD)
- Handwerkliches Geschick
- Interesse an der Arbeit mit Maschinen und Analgen
- Deutsch und Englisch in Wort und Schrift
Der Beginn kann ab sofort erfolgen. Eine grundlegende Vorarbeit ist vorhanden.
Weitere Informationen und Details sind beim genannten Mitarbeiter erhältlich. Eine Bearbeitung ist ab sofort möglich. Bewerbungen senden Sie bitte mit Notenauszug und Lebenslauf per E-Mail oder über das Anfrageformular. Wir werden zeitnah rückmelden.
Modellbildung und Abstraktion der Flugdynamik einer autonomen Drohne

Drohnen werden in unterschiedlichsten Gebieten der Industrie eingesetzt, unter anderem zum Materialtransport in der Logistik oder zur Erfassung und photogrammetrischen Rekonstruktion von Gebäuden und Baustellen.
Für den effizienten und sicheren Einsatz ist es wünschenswert, dass die Drohnen ihre Aufgaben selbstständig erledigen, also autonom agieren. Dadurch wird es möglich mithilfe Agenten-basierter Navigation die Drohnen hinsichtlich unterschiedlicher Kriterien zu optimieren.
In dieser Arbeit soll eine Modellbildung erfolgen, um die Dynamik eines Demonstrators (Hexacopter) vereinfacht in einer Simulation abbilden zu können und somit das Agententraining zu verbessern.
Ziele und Arbeitsschritte
- Einarbeitung in ROS2 und die Programmierung autonomer Drohnen
- Aufnahme von Daten mit realer Drohne und in der Simulation
- Modellbildung mittels neuartiger Modellbildungs-Ansätze
Benefits
- Hands-On Erfahrung in der Entwicklung im Bereich Robotik
- Austausch mit anderen Studierenden am FAPS
- Einblicke in weitere Forschungsbereiche
- Anwendungsbezogene Arbeit für den Berufseinstieg
- Flexible Arbeitsweise
Hinweise zur Bewerbung
- Programmiererfahrung in Python und/oder C++
- Vorkenntnisse mit dem ROS2, Reinforcement Learning oder Regelungstechnik sind von Vorteil
- Gute Englischkenntnisse sind erforderlich
- Beginn jederzeit möglich
- Bewerbungen bitte per E-Mail mit aktueller Notenübersicht und Lebenslauf