Index
Intel Ready to Fly Drone

| Spezifikationen: | |
| Hersteller | Intel® Corporation |
| Typ | Quadrocopter |
| Flügelspannweite | 590 mm |
| Eigengewicht | 865 g |
| max. Abfluggewicht | 1900 g |
| max. Flughöhe | 112 m |
| Höchstgeschwindigkeit | 15 m/s |
| Sensoren | Intel RealSense 3D-Kamera, RGB-Kamera, Monochromkamera, IMU, Magnetometer, Höhenmesser, GPS |
| Bordcomputer | Intel Aero Compute Board (Intel® Atom™ x7-Z8750 Vierkernprozessor, 4 GB Arbeitsspeicher, zusätzlicher FPGA) |
| Software | Dronecode px4 Autopilot, Linux, ROS |
Rethink Robotics Baxter Robot Research

| Spezifikationen | |
| Hersteller | Rethink Robotics |
| Robotertyp | Forschungsroboter mit zwei siebenachsigen Armen und dreh-/schwenkbarem Display |
| Sicherheit | inhärent sicheres Design mit nachgiebigen Gelenken und rückstellbaren Motoren |
| Anzahl Freiheitsgrade | 14 (7 je Arm) und 2 (Display) |
| Maximale Traglast | 2,3 kg |
| Höhe | 93,98 cm ohne Podest, 1,78/1,9 m mit Podest |
| Gewicht | 75 kg ohne Podest, 64 kg Podest |
| Reichweite | 104 cm je Arm |
| Sensoren | 360° Ultraschall, 3 Kameras (1 je Arm, 1 Frontkamera), Positions-, Geschwindigkeits- und Momentensensorik in jedem Gelenk |
| Steuerung | ROS (Robot Operating System)-Framework und SDK |
| Greifer | 2 elektrische Parallel-, 1 Vakuumsauggreifer |
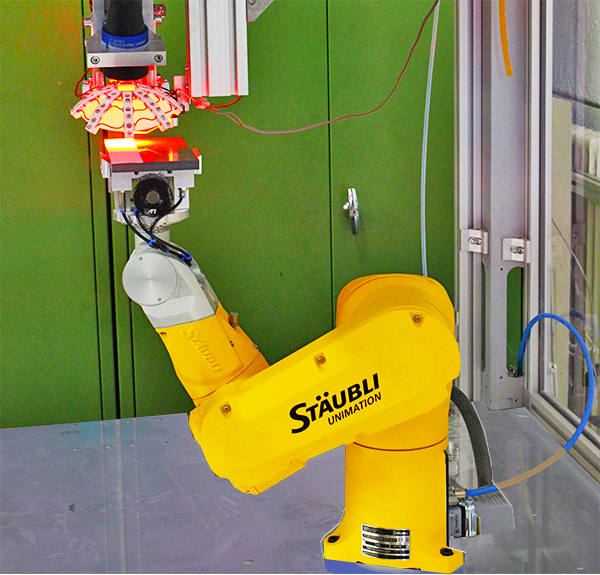
Stäubli Roboter TX40
| Spezifikation | |
| Hersteller | Stäubli |
| Anzahl Einheiten | 1 |
| Robotertyp | Industrieroboter – 6-achsiger Gelenkarmroboter |
| Anzahl Freiheitsgrade | 6 |
| Maximale Traglast | 2,3 kg |
| Nominale Traglast | 1,7 kg |
| Reichweite | 515 mm |
| Wiederholgenauigkeit | ± 0,02 mm (ISO 9283) |
| Max. Geschwindigkeit im Lastenschwerpunkt | 8,2 m/s |
| Steuerung | CS8C (Hardware und Softwarestand 2015), 2 ms Interpolationstakt |
| Software | Stäubli Robotic Suite 2013 |
Stäubli Roboter TX60L
| Spezifikation | |
| Hersteller | Stäubli |
| Anzahl Einheiten | 2 |
| Robotertyp | Industrieroboter – 6-achsiger Gelenkarmroboter |
| Anzahl Freiheitsgrade | 6 |
| Maximale Traglast | 5 kg |
| Nominale Traglast | 3 kg |
| Reichweite | 920 mm |
| Wiederholgenauigkeit | ± 0,03 mm (ISO 9283) |
| Max. Geschwindigkeit im Lastenschwerpunkt | 10,6 m/s |
| Steuerung | CS8C (Hardware und Softwarestand 2015), 2 ms Interpolationstakt |
| Software | Stäubli Robotic Suite 2013 |
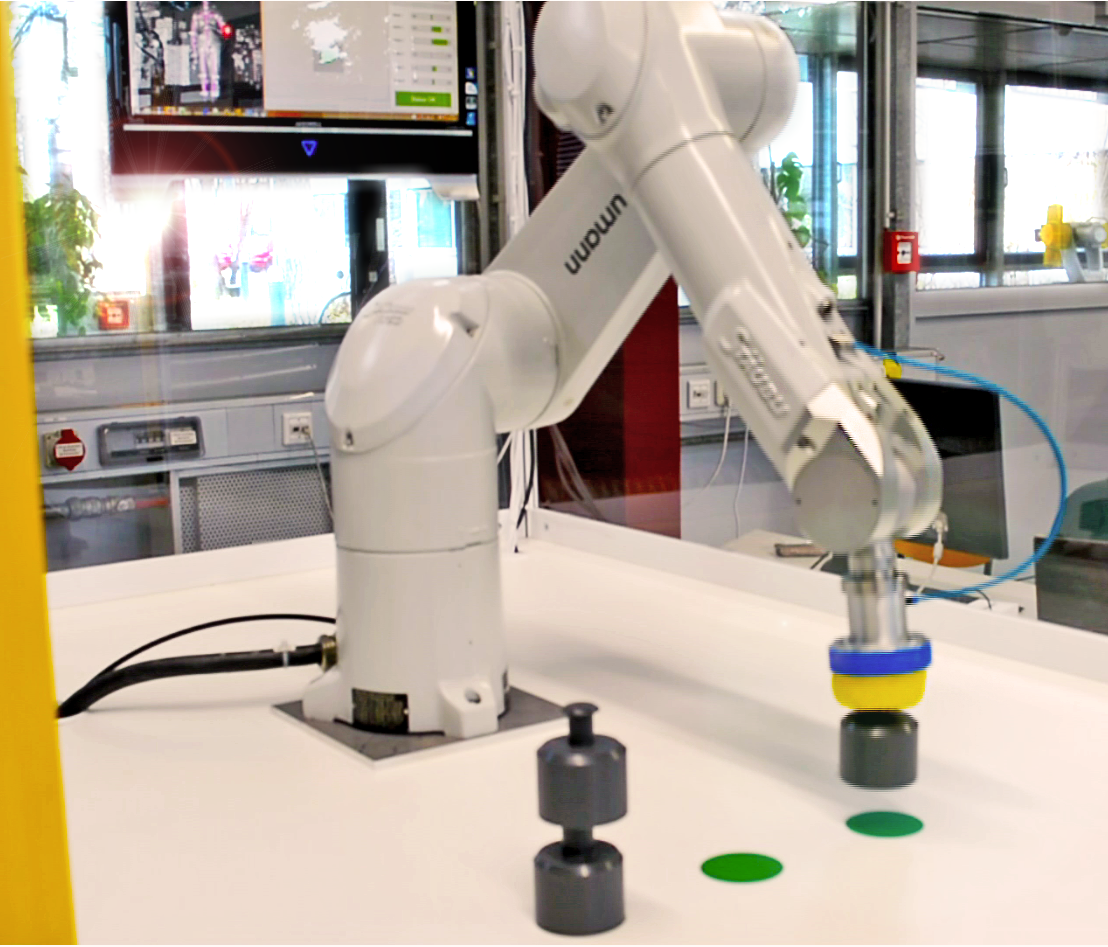
Universal Robots UR10

| Spezifikation | |
| Hersteller | Universal Robots |
| Anzahl Einheiten | 1 |
| Robotertyp | Leichtbauroboter – 6-achsiger Gelenkarmroboter |
| Anzahl Freiheitsgrade | 6 |
| Maximale Traglast | 10 kg |
| Reichweite | 1300 mm |
| Wiederholgenauigkeit | ± 0,1 mm (ISO 9283) |
| Geschwindigkeit: | Werkzeugschnittstelle: Ca. 1 m/s |
| Kollaborierender Betrieb | nach: EN ISO 13849:2008 PL d EN ISO 10218-1:2011, Abschnitt 5.4.3 |
| Steuerung | UR Controller |
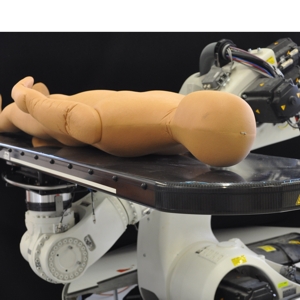
Kuka Roboter KR 240 L210 MED TT
| Spezifikationen | |
| Hersteller | Kuka Roboter |
| Robotertyp | KR 240 L210 MED TT |
| Anzahl Freiheitsgrade | 6 |
| Traglast | 225 kg |
| Reichweite | 2451 mm |
| Wiederholgenauigkeit | ±0,10 mm |
| Steuerung | KR C2 Treatment Table (TT) |
| Zusätzliche Steuerungskomponenten | Programmierhandgerät KCP |
Neuronics Roboter Katana 450

| Spezifikationen | |
| Hersteller | Neuronics AG |
| Robotertyp | Knickarmroboter |
| Anzahl Achsen | 6 |
| Traglast ab Flansch | 400 g |
| Reichweite (Flansch) | 517 mm |
| Eigengewicht | 5.2kg (ohne Controlbox und Greifer) |
| Steuerung | PC oder standalone |
| Material | Eloxiertes hochfestes Aluminium |
| Antriebssystem | DC-Motoren mit Inkrementalencoder |
| Getriebe | Harmonic Drive |
Mobile Roboterplattform autoBod

| Spezifikationen | |
| Hersteller | Robert Bosch GmbH |
| Robotertyp | Mobile Roboterplattform autoBod |
| Antriebstyp | Differentialfahrwerk |
| Traglast | 200 kg |
| Eigengewicht | 15 kg |
| Sensoren | Laserscaner, Kamera, Odometriesensoren, taktile Taster zum Lasthandling |
| Steuerung | Pokini i2 |
| Software | Linux, ROS |
Mobile Roboterplattform Robotino3

| Spezifikationen | |
| Hersteller | Festo Didactic |
| Robotertyp | Mobile Roboterplattform Robotino3 |
| Antriebstyp | Omnidirektionales Fahrwerk |
| Traglast | 30 kg |
| Eigengewicht | 20 kg |
| Sensoren | Laserscanner, 3D-Kamera, USB-Kamera, 1D-Abstandssensoren, Odometriesensoren, Gyroskope |
| Steuerung | Intel i5 onboard, optional Intel i7 als Zusatzlaptop |
| Software | Linux, ROS |
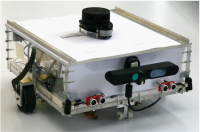
Mobile Roboterplattform FAPS-VAV
| Spezifikationen | |
| Hersteller | FAPS |
| Robotertyp | Mobile Roboterplattform FAPS-VAV |
| Antriebstyp | Differentialfahrwerk |
| Traglast | 10 kg |
| Eigengewicht | 1 kg |
| Sensoren | Laserscaner, Odometriesensoren, Ultraschallabstandssensoren |
| Steuerung | Odroid-XU4, Arduino Mega |
| Software | Linux, ROS |