


")
Ausgangslage:
Intelligente Roboter sind das Rückgrat der vierten industriellen Revolution, kurz Industrie 4.0. Während beim Einsatz klassischer Industrieroboter meist eine strikte Trennung zwischen dem Arbeitsplatz des Roboters und dem des Menschen vorliegt, rückt angesichts der Fortschritte in den Bereichen Sensorik, Aktorik, Navigation und Vernetzung auch die Interaktion zwischen Mensch und Roboter in den Fokus. Durch den Einsatz von Methoden der Künstlichen Intelligenz (KI) werden Roboter immer mehr zu lernenden Systemen, die über komplexe, menschenähnliche Funktionen verfügen und in unerwarteten Situationen selbstständig Entscheidungen treffen. Eine wichtige Rolle spielen hierbei Bildverarbeitungssysteme in Verbindung mit innovativen KI-Verfahren wie Deep Learning oder Reinforcement Learning.
In der Folge eröffnen sich neue Einsatzpotentiale, die über die klassischen Anwendungsgebiete von Industrierobotern hinausgehen. Gerade die Fertigung kundenspezifischer elektrischer Antriebe ist aufgrund der geringen Losgrößen nach wie vor von manuellen Montagetätigkeiten geprägt. Im Rahmen der vorliegenden Arbeit soll auf Basis eines neu erworbenen Leichtbauroboters ein Demonstrator zur automatisierten, flexiblen Handhabung von Komponenten von Elektromotoren und/oder induktiven Ladepads konzeptioniert und aufgebaut werden.
Aufgabenstellung:
In diesem Kontext ergeben sich generell unterschiedliche Aufgabenstellung. So kann der Fokus je nach Interesse auf
- der Entwicklung von Schnittstellen und Einbindung zusätzlicher Komponenten in ROS (Robot Operating System),
- der programmiertechnischen Umsetzung der KI-gestützten Objekt- und Posenbestimmung oder
- der KI-gestützten Aktionsplanung für autonome Handhabungs- und Montageaufgaben liegen.
Eine mögliche Aufgabenstellung mit Fokus auf (2) wäre z.B. wie folgt:
- Einarbeitung in die Grundlagen der Programmierung von Leichtbaurobotern sowie von Machine Learning, insb. Deep Learning
- Recherche von bestehenden Ansätzen zur Objekt- und Posenbestimmung basierend auf Deep Learning (z.B. YOLO, DenseFusion, CosyPose)
- Auswahl und ggf. Weiterentwicklung eines geeigneten Ansatzes zur Automatisierung einer konkreten Handhabungsaufgabe im Bereich der Fertigung elektrischer Antriebe (z.B. Bin Picking von ungeordneten Gehäuseteilen)
- Prototypische Umsetzung und Evaluation des Ansatzes an der lehrstuhleigenen Demonstratorzelle
- Dokumentation der Arbeit und Ausblick auf Weiterentwicklungsmöglichkeiten
Eine mögliche Aufgabenstellung mit Fokus auf (3) wäre z.B. wie folgt:
- Einarbeitung in die Grundlagen der Programmierung von Leichtbaurobotern sowie von Machine Learning, insb. Reinforcement Learning
- Recherche von bestehenden Ansätzen zur roboterbasierten Manipulation von Bauteilen basierend auf Deep Reinforcement Learning, Imitation Learning oder Interactive Learning (z.B. CEILing)
- Auswahl und ggf. Weiterentwicklung eines geeigneten Ansatzes zur Automatisierung einer konkreten Handhabungsaufgabe im Bereich der Fertigung elektrischer Antriebe (z.B. Handhaben und Manipulieren von Drahtenden)
- Prototypische Umsetzung und Evaluation des Ansatzes an der lehrstuhleigenen Demonstratorzelle
- Dokumentation der Arbeit und Ausblick auf Weiterentwicklungsmöglichkeiten
Beginn, Umfang und genaue Schwerpunktsetzung erfolgen nach Absprache und persönlichem Interesse. Nähere Informationen gerne im Rahmen eines persönlichen Gesprächs.
Hinweise und Bewerbung:
- Für die Arbeit steht ein hochmoderner Rechner mit neuestem Intel Core i9 sowie zweier Nvidia RTX 2080 Ti zur Verfügung
- Beginn, Umfang und genaue Ausrichtung der Arbeit erfolgen nach Absprache und persönlichem Interesse
- Forschung an der Schnittstelle zwischen den Trendthemen Robotik, KI und Elektromotorenproduktion
- Programmierkenntnisse wünschenswert; die Möglichkeit der Einarbeitung wird gegeben
- Bewerbungen bitte mitsamt Lebenslauf und aktueller Fächerübersicht an andreas.mayr@faps.fau.de
Beispielhafter Einsatz eines Leichtbauroboters in der Elektromotorenproduktion:
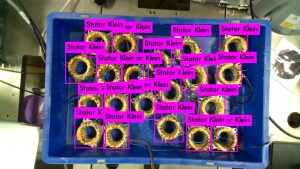
Beispielhafter Einsatz des Objekterkennungsalgorithmus YOLO zur Detektion von Statoren in einer Kiste (Quelle: FAPS):
Kategorien:
Forschungsbereich:
Art der Arbeit:
Bachelorarbeit, Diplomarbeit, Hauptseminar, Masterarbeit, Projektarbeit, StudienarbeitStudiengang:
Energietechnik, Informatik, IPEM, Maschinenbau, Mechatronik, Medizintechnik, WirtschaftsingenieurwesenTechnologiefeld:
Automatisierte Produktionsanlagen, Künstliche Intelligenz und Maschinelles Lernen, Medizintechnik, Planung und Simulation, Software Engineering und DeploymentKontakt:
Andreas Mayr, M.Sc., M.Sc.
Department Maschinenbau (MB)
Lehrstuhl für Fertigungsautomatisierung und Produktionssystematik (FAPS)
- Telefon: +499115302-99064
- E-Mail: andreas.mayr@faps.fau.de
Andreas Morello, M. Sc.
Department Maschinenbau (MB)
Lehrstuhl für Fertigungsautomatisierung und Produktionssystematik (FAPS, Prof. Franke)
- Telefon: +499115302-96277
- E-Mail: andreas.morello@faps.fau.de