Index
[BA/PA/MA] AI-gestützte Erkennung elektrischer Prüfpunkte in Schaltschränken
Motivation
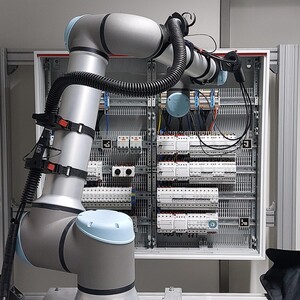
Im Rahmen des Forschungsprojekts „ProTekt“ am FAPS arbeiten wir an der Automatisierung der Qualitätsprüfung von Schaltschränken. Ein wichtiger Baustein dabei ist die elektrische Prüfung. Damit ein Roboter elektrische Messungen automatisiert durchführen kann, müssen die passenden Prüfpunkte an den verbauten Komponenten zuverlässig erkannt und lokalisiert werden. Prüfpunkte sind die elektrischen Kontaktstellen an den Komponenten, über die einzelne Anschlüsse elektrisch ankontaktiert werden können. In der Praxis ist ihre Erkennung jedoch herausfordernd: Form, Lage, Größe und visuelle Erscheinung variieren stark zwischen unterschiedlichen Herstellern, Komponentenarten und Schaltschrankaufbauten.
Ziel der Arbeit
Ziel deiner Arbeit ist es, ein leichtgewichtiges Computer-Vision-Verfahren zur robusten Erkennung von Prüfpunkten zu entwickeln, zu bewerten und prototypisch umzusetzen. Im Zentrum steht dabei ein CNN-basiertes Modell, das Prüfpunkte als eigene Objektklasse erkennt und auch bei hoher Varianz der Komponenten zuverlässig funktioniert.
Dazu gehört insbesondere:
- Einarbeitung in den Projektkontext und die Rolle elektrischer Prüfpunkte in der automatisierten Schaltschrankprüfung
- Analyse vorhandener Bilddaten sowie Einbezug und Bewertung geeigneter Online-Datensätze für Training und Validierung
- Optional: Anpassung einer bestehenden Pipeline zur Erzeugung synthetischer Daten, sodass diese auch für Prüfpunkte genutzt werden kann
- Entwicklung eines leichtgewichtigen CNN-basierten Ansatzes zur Detektion
- Untersuchung, welche Merkmale und Datenrepräsentationen für eine robuste Generalisierung über viele Komponenten hinweg geeignet sind
- Entwicklung einer geeigneten Methodik, um die Robustheit des Systems bei hoher Varianz nachvollziehbar nachzuweisen
- Durchführung einer sinnvollen Evaluierung mit unterschiedlichen Komponentenklassen, Ausprägungen und Schwierigkeitsgraden
Ziel ist ein Prüfpunkt-Detektionssystem, das nicht nur auf wenigen Einzelbeispielen funktioniert, sondern seine Robustheit auch über eine große Bandbreite realer Komponenten hinweg nachvollziehbar zeigt.
Anforderungen an den Studierenden
- Studium im Bereich Maschinenbau, Mechatronik, Wirtschaftsingenieurwesen oder vergleichbar
- Interesse an Computer Vision, Deep Learning und praxisnaher AI-Anwendung
- Erste Programmierkenntnisse, vorzugsweise in Python
- Selbstständige und strukturierte Arbeitsweise
- Sehr gute Deutsch oder Englisch Kenntnisse
Bewerbungen bitte per Mail mit Lebenslauf und aktuellem Notenspiegel an matthias.lang@faps.fau.de
Start: jederzeit möglich
Ort: Nürnberg am FAPS Standort „auf AEG“ – hybrid möglich
[BA\PA\MA]: Event- and Frame-Based Vision for Wire Tracking
Initial Situation:
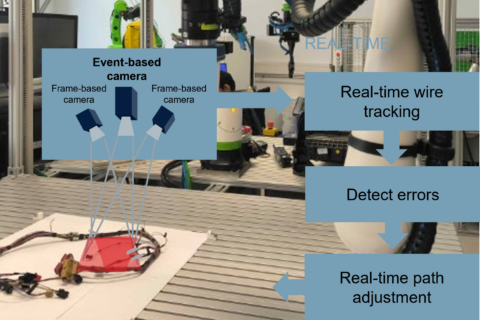
The handling and processing of cables and wires is currently characterized by manual activities due to their flexible material behavior. However, due to the ever-increasing complexity of cable systems in vehicle construction, there is also an acute need for action in industry to automate the process. As part of an automation project with a major German OEM, an automation solution is to be developed for cable harness production and assembly in the vehicle.
Possible thesis:
The objective of this thesis is to optimize existing computer vision algorithms for the robotic insertion of a wiring harness into the center console of a contemporary premium vehicle. The scope is roughly divided as follows and can be tailored according to your interests:
- Designing a comparative framework for benchmarking event-based vision algorithms against traditional frame-based methods
- Investigate potential of a multimodal fusion approach integrating event- and frame-based vision with force / acoustic sensing for enhanced process feedback
- Implementing & testing the system in a simulated or experimental setup involving robotic insertion and inspection tasks
- Analyzing performance metrics such as latency, accuracy, and robustness under varying conditions
- Discussion and outlook on further development possibilities
Focus on:
- 3D Computer Vision
- Pose estimation
- Robotics
What you should bring:
- Independent and structured work style
- Good documentation of the approach
- Good knowledge of German or English language
- Python knowledge desirable
- Computer Vision knowledge advantageous
Other notes:
- Start date can be immediate
- Remote work possible
- Work scope can be individually tailored according to interests
- Please apply with a current grade transcript and resume
[BA\PA\MA]: Real-time Path Adjustment of Industrial Robots in ROS2 for Obstacle Avoidance
Initial Situation:
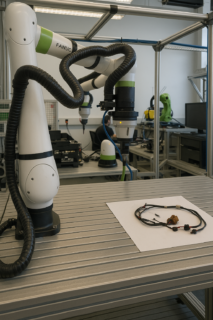
The handling and processing of cables and wires is currently characterized by manual activities due to their flexible material behavior. However, due to the ever-increasing complexity of cable systems in vehicle construction, there is also an acute need for action in industry to automate the process. As part of an automation project with a major German OEM, an automation solution is to be developed for cable harness production and assembly in the vehicle.
Scope of the thesis:
The objective of this thesis is to implement methods for real-time path adjustment based on in order to grasp a wire harness and avoid entanglement of the wires. Several approaches (e.g. Reinforcement Learning, Learning-by-Demonstration and Sim2Real with Nividia Isaac Sim) should be tested and compared. The thesis is roughly divided as follows:
- Familiarization with ROS2 and programming of industrial robots
- Adaptation of the simulation environment and training of agents
- Improvement of algorithms to generate the parameters for position correction
- Transfer and validation on real systems
Benefits
- Hands-on experience in robotics development
- Exchange with other students at FAPS
- Insights into other areas of research
- Application-oriented work for career entry
What you should bring:
- Interest in AI-supported robotics and learning systems
- Experience in programming with Python/C++ and ROS2, as well as basic knowledge of machine learning
- Independent, structured, and scientifically sound approach to work
- German (C1) or English (C1)
Other notes:
- Start date can be immediate
- Remote work possible
- Work scope can be individually tailored according to interests
- Please apply with a current grade transcript and resume
[BA/PA/MA] Branchenanalyse des Schaltschrankbaus mit Fokus auf Prüfprozesse und Automatisierungspotenziale
Motivation
Der Schaltschrankbau ist eine zentrale, aber wenig standardisierte Industriebranche mit hoher Varianz in Produkten, Anwendungen und Fertigungsprozessen. Gleichzeitig steigen die Anforderungen an Qualität, Dokumentation und Effizienz. Die Prüfung von Schaltschränken ist dabei ein kritischer Schritt, der heute noch stark manuell geprägt ist. Im Rahmen des Projekts „ProTekt“ am FAPS wird die Automatisierung dieser Prüfprozesse gezielt erforscht und weiterentwickelt.
Ziel der Arbeit
Ziel der Arbeit ist es, eine strukturierte Branchenübersicht des Schaltschrankbaus zu erarbeiten und daraus die Anforderungen, bestehende Lösungen sowie Potenziale für die Automatisierung der Qualitätsprüfung systematisch abzuleiten.
Dazu gehört insbesondere:
- Strukturierung der Branche anhand relevanter Dimensionen (z.B. Arten von Schaltschränken, Spannungsebenen und Leistungsbereiche, Einsatzbranchen, …)
- Analyse typischer Fertigungs- und Montageprozesse im Schaltschrankbau
- Untersuchung relevanter Normen und Richtlinien für die Prüfung (z. B. elektrische, visuelle und funktionale Prüfungen)
- Überblick über bestehende kommerzielle Prüflösungen, sowie Automatisierungslösungen mit Einfluss auf die Prüfung
- Systematische Ableitung von Anforderungen und Herausforderungen für die Prüfautomatisierung
- Identifikation von Dimensionen, die die Relevanz und das Potenzial von Automatisierung beeinflussen (z. B. Varianz, Stückzahlen, Komplexität, Sicherheitsanforderungen)
- Erarbeiten offener Fragen, die im Rahmen einer späteren Branchenumfrage adressiert werden können
Ziel ist ein klar strukturiertes Gesamtbild der Branche mit einem besonderen Augenmerk auf Qualitätsprüfung, das als Grundlage für weitere Forschungs- und Entwicklungsarbeiten dient.
Anforderungen an den Studierenden
- Studium im Bereich Maschinenbau, Mechatronik, Wirtschaftsingenieurwesen oder vergleichbar
- Interesse an industriellen Prozessen und technischen Systemen
- Fähigkeit, komplexe Themen strukturiert zu analysieren und aufzubereiten
- Selbstständige Literatur- und Internetrecherche
Bewerbungen bitte per Mail mit Lebenslauf und aktuellem Notenspiegel and matthias.lang@faps.fau.de
Start: jederzeit möglich
Ort: Nürnberg am FAPS Standort „auf AEG”
Die Durchführung der Arbeit ist remote möglich
Entwicklung einer Methodik zur Prozessbeschreibung für die automatisierte Fertigung von Kabelbäumen
Jedes moderne Fahrzeug enthält einen Kabelbaum mit bis zu mehreren Kilometern Leitungen und tausenden von Einzelkomponenten – und wird trotz dieser Komplexität bis heute überwiegend in Handarbeit gefertigt. Die Automatisierung dieser Fertigung ist daher ein aktives Forschungsfeld mit hoher industrieller Relevanz. Der Kabelbaum dient dabei als konkreter Anwendungsfall für eine grundlegendere Fragestellung: Wie lassen sich komplexe industrielle Fertigungsprozesse so formal und maschinenlesbar beschreiben, dass eine automatisierte Produktionsanlage diese eigenständig interpretieren und ausführen kann? Diese Fragestellung ist branchenübergreifend relevant und betrifft Domänen von der Elektronikfertigung bis zur Pharmaindustrie.
Methodisch steht die Asset Administration Shell (AAS) im Mittelpunkt – der derzeit wichtigste offene Standard für die digitale Repräsentation von Produktionsanlagen und -prozessen im Kontext von Industrie 4.0. Die Arbeit untersucht, wie Engineering-Daten (KBL, VEC, STP), digitale Fertigungsaufträge und ressourcenspezifische Informationen nach dem PPR- (Produkt-Prozess-Ressource) und CSS-Modell systematisch zu ausführbaren Prozessbeschreibungen verknüpft werden können.
Aufgabenstellung:
- Analyse bestehender Ingenieursformate (KBL, VEC, STP) hinsichtlich ihrer Eignung zur automatisierten Prozesssteuerung
- Strukturierung der Fertigungsschritte nach dem PPR- und CSS-Modell
- Entwicklung und prototypische Implementierung eines AAS-Submodells „ProcessParameters”
- Ableitung von Anforderungen an Engineering- und Ressourcendaten
- Validierung der Methodik anhand eines konkreten Anwendungsbeispiels
Anforderungen:
- Studium im Bereich Informatik / Maschinenbau / IPEM / WING / Mechatronik / Elektrotechnik o. Ä.
- Interesse an Industrie-4.0-Konzepten, digitalen Zwillingen und Fertigungsautomatisierung
- Grundkenntnisse in Softwareentwicklung oder modellbasierter Systembeschreibung von Vorteil
- Selbstständige, strukturierte und analytische Arbeitsweise
- Deutsch und/oder Englisch in Wort und Schrift
Bitte bewerben Sie sich mit einem aktuellen Notenspiegel und Lebenslauf an simon.lamprecht@faps.fau.de.
[BA/PA/MA] Weiterentwicklung eines Closed-Loop-Prozesses in der roboterbasierten Montage von Wallboxen
Das Projekt Restladung zielt darauf ab, Herausforderungen im Elektromobilitätssektor, insbesondere die ungleichmäßige Nutzung dreiphasiger
Stromversorgung, zu bewältigen. Daher steht die Entwicklung einer hocheffizienten und kostengünstigen DC-Wallbox im Mittelpunkt.
Das Teilprojekt des FAPS fokussiert neben dem automatisierungsgerechten Produktdesign insbesondere die hochpräzise Montage der
Leistungselektronik in das Gehäuse. Besondere Berücksichtigung gilt demnach der optimalen Wärmekopplung beider Komponenten durch den Einsatz
von 3D-Kameratechnik. Es werden der Einfluss von Fertigungs- und Montagetoleranzen auf das Kühlverhalten analysiert und zur Optimierung der
Wärmeleitung ein Prozess des flexiblen Toleranzausgleichs mittels adaptiven Auftrages von wärmeleitfähigen Substanzen erarbeitet und im
Zusammenspiel mit einem darauffolgenden Schraubprozesses prototypisch untersucht.
Aufgabenstellung:
- Weiterentwicklung und Optimierung des SPS-Programms
- Integration und Auswahl geeigneter Sensorik und Aktorik
- Auswertung der 3D-Kamera Bilddaten und Nutzung neuer Algorithmen
- Untersuchung eines aktiven Toleranzausgleichs mithilfe der Schraub- und Dosierparameter
- Untersuchung von mechanischen Verhalten und Einflüssen in der Platinenmontage
Anforderungen:
- Studium im Bereich Maschinenbau / IPEM / WING / Mechatronik / Elektrotechnik o.Ä.
- Technisches Geschick und Bereitschaft, sich in neue Technologien einzuarbeiten
- Hohe Motivation, Neugierde sowie eine selbständige und strukturierte Arbeitsweise
- Deutsch in Wort und Schrift
Bitte bewerben Sie sich mit einem aktuellen Notenspiegel und Lebenslauf.
BA/PA/MA – Entwicklung und Simulation eines Dosierroboters mit VLA-basierter Bewegungssteuerung unter Verwendung von ROS
Um die Dosierung von Pasten und Flüssigkeiten zu automatisieren, bietet der Einsatz von Robotersystemen großes Potenzial. Insbesondere können Vision-Language-Action-Modelle dazu beitragen, Roboter zu befähigen, flexibel auf Bauteil- und Materialtoleranzen sowie Prozessunsicherheiten zu reagieren. Dadurch lassen sich starre, vorprogrammierte Bewegungsabläufe durch adaptivere, datengetriebene Strategien ergänzen.
Im Rahmen dieser Arbeit soll ein Demonstrator für eine robotergestützte Dosieranwendung aufgebaut werden. An diesem Versuchsaufbau werden typische Dosieraufgaben definiert und experimentell umgesetzt. Ziel ist es, Datensätze für die Entwicklung und Untersuchung VLA-basierter Bewegungsstrategien zu generieren und auszuwerten.
Parallel dazu soll eine Simulationsumgebung auf Basis von ROS entwickelt werden, in der der Demonstrator und relevante Dosierprozesse modelliert werden. Ein besonderer Fokus liegt darauf zu untersuchen, inwiefern Trainingsdaten für VLA-Modelle in der Simulation erzeugt werden können und welche Unterschiede bzw. Übertragbarkeit zwischen simulierten und realen Datensätzen bestehen. Dabei sollen Möglichkeiten und Grenzen der Sim-to-Real-Übertragung analysiert werden.
Mögliche Aufgabenschwerpunkte
- Mechanische Weiterentwicklung des Roboterarms
- Integration des Roboters in eine ROS Umgebung
- Aufnehmen von Datensätzen zum Training eines VLA Modells
- Validierung des Modells
- Simulation der Dosieroperationen
Anforderungen:
- Studium im Bereich Maschinenbau / IPEM / WING / Mechatronik o.Ä.
- Technisches Geschick und Bereitschaft, sich in neue Technologien einzuarbeiten
- Hohe Motivation, Neugierde sowie eine selbständige und strukturierte Arbeitsweise
- Deutsch in Wort und Schrift
Die genauen Aufgaben können je nach individuellen Fähigkeiten und Interessen variieren.
Bewerbungen mit Lebenslauf und aktueller Notenübersicht bitte per E-Mail.
[BA/PA/MA]: Entwicklung eines Verfahrens zur thermografiebasierten Hotspotdetektion auf Leiterplatten mittels maschinellen Lernens
Das Projekt Restladung umfasst die Entwicklung einer kosteneffizienten DC-Wallbox auf Basis einer Ein-Platinen-Lösung und einer passiven Wärmeabfuhr. Besondere Berücksichtigung gilt demnach der optimalen Wärmekopplung beider Komponenten. Es werden der Einfluss von Fertigungs- und Montagetoleranzen auf das Kühlverhalten analysiert und zur Optimierung der Wärmeleitung ein Prozess des flexiblen Toleranzausgleichs mittels adaptiven Auftrages von wärmeleitfähigen Substanzen erarbeitet und im Zusammenspiel mit einem darauffolgenden Schraubprozesses prototypisch untersucht.
Hierfür entwickelst du einen Versuchsaufbau, mit dem die Wärmekopplung zwischen MOSFETs und Kühlkörpern untersucht werden kann. Dafür steht eine Wärmebildkamera zur Verfügung, die die Wärmeentwicklung auf der Platine messen kann.
Aufgabenstellung:
- Entwicklung eines Versuchsaufbaus unter Berücksichtigung von Beleuchtung, Abstand, Winkel und Einstellungen der Wärmebildkamera
- Entwicklung einer Methodik zur Erkennung von Anomalien in der Wärmekopplung
- Durchführung einer DOE
- Dokumentation der Ergebnisse
Anforderungen:
- Studium im Bereich Maschinenbau / IPEM / WING / Mechatronik / Elektrotechnik o.Ä.
- Technisches Geschick und Bereitschaft, sich in neue Technologien einzuarbeiten
- Hohe Motivation, Neugierde sowie eine selbständige und strukturierte Arbeitsweise
- Deutsch in Wort und Schrift
Bitte bewerben Sie sich mit einem aktuellen Notenspiegel und Lebenslauf.
Validierung eines Multi-Peg-in-Hole-Greifers für das automobile Bordnetz
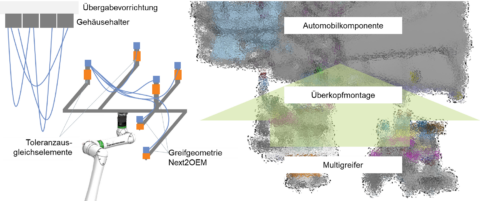
Die Handhabung und Verarbeitung von Kabeln und Leitungen im automobilen Bordnetz ist aufgrund des biegeschlaffen Materialverhaltens und enger Bauräume traditionell stark manuell geprägt. Mit steigender Komplexität von Kabelsystemen (Variantenvielfalt, Bauraumrestriktionen, erhöhte Qualitätsanforderungen) wächst der Bedarf an robusten, automatisierbaren Montageprozessen.
Im Rahmen eines Automatisierungsprojekts mit einem großen deutschen OEM wird eine Lösung zur Automatisierung des Steckprozesses im Fahrzeugkontext erarbeitet.
Zielsetzung:
Ziel der Arbeit ist die Auslegung und Validierung eines Multi-Peg-in-Hole-Greifers für Steckvorgänge im automobilen Bordnetz. Kern ist die Entwicklung eines Toleranzausgleichsmechanismus, das Lage- und Orientierungsfehler zwischen Stecker und Gegenstück zuverlässig kompensiert und dadurch prozesssichere, wiederholgenaue Steckoperationen ermöglicht.
Mögliche Arbeitsinhalte:
- Aufzeigen des Standes der Technik und Forschung im Bereich von Multi-Peg-in-Hole-Steckvorgängen
- Bildverarbeitung zur Erkennung kompensierbarer Abweichungen an Gegensteckstellen
- Auslegung des Toleranzausgleichselements
- Validierung der gefundenen Lösungen anhand eines Hardware-Demonstrators
Was Du mitbringen sollest:
- Kenntnisse im Bereich Regelungstechnik
- Selbständige und Strukturierte Arbeitsweise
- Gute Dokumentation des Vorgehens
Sonstige Hinweise:
- Beginn ab sofort möglich
- Arbeitsumfang kann individuell und entsprechend der Interessen angepasst werden
- Bewerbungen bitte mit aktuellem Notenauszug und Lebenslauf
Entwicklung und Training eines World Models für die Pfadplanung gekoppelter Planarmover
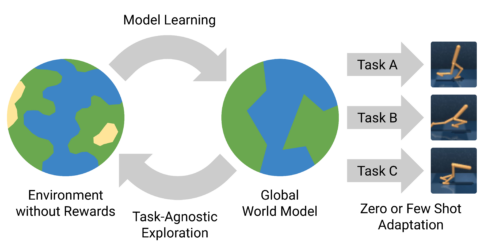
In der modernen Robotik stoßen klassische Planungs- und Optimierungsverfahren bei mehreren physikalisch gekoppelten Agenten (z. B. Planarmover, verbunden durch flexible Kabel) schnell an Grenzen: Die Dynamik ist nichtlinear, Zustände sind hochdimensional, und relevante Nebenbedingungen (Kollisionen, Kabelspannung, Kontakt) sind schwer exakt zu modellieren.
World Models versprechen hier einen alternativen Zugang: Statt ausschließlich im „echten“ Simulator zu planen, wird ein gelerntes Dynamikmodell trainiert, das Zustandsübergänge und ggf. Kosten/Nebenbedingungen vorhersagt. Planung kann dann teilweise im Modell (imagination/planning-in-latent-space) erfolgen – effizienter und potenziell robuster gegenüber Störungen.
Im Rahmen dieser Arbeit soll eine bestehende MuJoCo-Simulationsumgebung für Planarmover genutzt und erweitert werden, um ein World Model zu trainieren und für die Pfad-/ Bewegungsplanung einzusetzen.
Zielsetzung:
Ziel der Arbeit ist die Entwicklung einer World-Model-basierten Erweiterung eines vorhandenen Planungsmoduls, das die koordinierte Bewegung mehrerer kabelgekoppelter Planarmover in MuJoCo steuert.
Das World Model soll dabei die Dynamik (Zustandsübergänge) der Planarmover-Kabel-Interaktion approximieren, latente Zustandsrepräsentationen lernen und als Grundlage für modellbasierte Planung dienen (z. B. MPC, CEM, Trajektorien-Optimierung, Suche im latenten Raum).
Mögliche Arbeitsinhalte:
- Einarbeitung in das bestehende Planungsmodul und die MuJoCo-Umgebung
- Recherche aktueller Arbeiten zum Einsatz von World Models
- Aufbau einer World-Model-Architektur (z.B. Dreamer V3)
- Planung im World Model
- Evaluation durch Vergleich mit anderen Lösungsansätzen (Such- oder Lernbasiert)
Was Du mitbringen sollest:
- Programmierkenntnisse in Python
- Kenntnisse im Bereich Reinforcement Learning
Sonstige Hinweise:
- Beginn ab sofort möglich
- Arbeitsumfang kann individuell und entsprechend der Interessen angepasst werden
- Bewerbungen bitte mit aktuellem Notenauszug und Lebenslauf