Index
Erweiterbare Gestensteuerung für mobile Roboter

Die Interaktion zwischen Menschen und autonomen mobilen Robotern (AMR) wird zunehmend alltäglicher – insbesondere in öffentlichen oder gemeinsam genutzten Räumen. In solchen Situationen ist eine intuitive, unmittelbare Steuerungsmöglichkeit essenziell, insbesondere dann, wenn es zu unvorhergesehenen Konflikten oder Störungen kommt.
Eine vielversprechende Lösung stellt die gestenbasierte Steuerung dar. Sie ermöglicht eine natürliche, sprachunabhängige Kommunikation mit dem Roboter – ganz ohne technische Vorkenntnisse, Programmierung oder zusätzliche Eingabegeräte. Besonders für Laien bietet dies eine niederschwellige Möglichkeit, dem Roboter einfache Anweisungen zu erteilen.
Bei komplexeren Befehlen hingegen existieren häufig keine allgemein bekannten oder intuitiven Gesten. Solche Anweisungen müssen dem Roboter erst durch eine Kombination aus Geste und Bedeutung beigebracht werden. Der Roboter soll diese Kombinationen anschließend erkennen und die zugehörige Aktion selbstständig ausführen können.
Eine zentrale Herausforderung besteht darin, dass Gesten individuell, kulturell unterschiedlich und stark kontextabhängig sind. Verschiedene Personen nutzen für dieselbe Intention oft ganz unterschiedliche Bewegungen. Eine statische, vorab definierte Gestenbibliothek stößt hier schnell an ihre Grenzen. Hinzu kommt, dass sich im laufenden Betrieb neue Anforderungen und damit neue Befehle ergeben können, auf die der Roboter flexibel reagieren muss.
An dieser Stelle kommen Vision-Language-Modelle (VLM) ins Spiel. Diese multimodalen Modelle können Eingaben aus Bild- und Textebene kombinieren und in einem semantischen Kontext interpretieren. Dadurch wird es möglich, nicht nur bekannte, sondern auch neuartige oder zuvor nicht explizit gelernte Gesten mit Bedeutung zu verknüpfen.
Ziel der Arbeit ist es, ein erweiterbares System zur Gestensteuerung für mobile Roboter zu entwickeln, das auf einem VLM basiert. Dieses System soll neue Gesten-Befehl-Kombinationen erlernen, interpretieren und ausführen können – flexibel, robust und benutzerfreundlich.
- Voraussetzungen
- Freude am Programmieren
- Motivation und eigenständige Arbeitsweise
- Sehr gute Deutsch- oder Englischkenntnisse
- Vorerfahrung im gewünschten Themenbereich
- Kenntnisse in ROS2 von Vorteil
- Hinweise zur Bewerbung:
- Beginn ist jederzeit möglich
- Bewerbungen bitte per E-Mail mit aktueller Notenübersicht und Lebenslauf senden (unvollständige Bewerbungen werden nicht berücksichtigt).
- BA/PA/MA möglich
- Der Arbeitsumfang kann entsprechend der Art der Abschlussarbeit angepasst werden.
Detaillierte Informationen zu den möglichen Themengebieten und deren Aufgabenstellungen werden gerne in einem persönlichen Gespräch erläutert. Bei Interesse können gerne gemeinsam weitere mögliche Themen entwickelt werden.
Abschlussarbeit zu autonomen Drohnen

Drohnen werden in unterschiedlichsten Gebieten der Industrie eingesetzt, unter anderem zum Materialtransport in der Intralogistik oder zur Erfassung digitaler Lagebilder.
Für den effizienten und sicheren Einsatz ist es wünschenswert, dass die Drohnen ihre Aufgaben selbstständig erledigen, also autonom agieren. Durch den autonomen Betrieb wird es möglich mithilfe geeigneter Navigation die Drohnen beispielsweise hinsichtlich ihres Energieverbrauchs zu optimieren. Hierfür ist die Erforschung robotischer Infrastrukturen (Robot Operating System 2), Computer-Vision, neuartiger KI-Modelle und Reinforcement Learning erforderlich. Zudem sind Hardwareaspekte, wie ein stabiler Aufbau des Flugroboters sowie die Ausstattung mit entsprechender Sensorik zu beachten.
Am Flugfeld des Lehrstuhl FAPS sind verschiedene Themen für Bachelor- und Masterarbeiten in den oben genannten Bereichen zu vergeben. Voraussetzung ist die Motivation zur selbständigen Einarbeitung in die Programmierung von Flugrobotern. Weitere Informationen erhalten Sie auf Anfrage per E-Mail.
Hinweise zur Bewerbung
- Freude an der Programmierung
- Interesse am Robot Operating System
- Gute Englischkenntnisse erforderlich
- Sehr gute Deutscherkenntnisse erforderlich (mind. C1)
- Selbstständige Arbeitsweise
- Beginn jederzeit möglich
- Bewerbungen bitte per E-Mail mit aktueller Notenübersicht und Lebenslauf
- Bitte beachten Sie, dass unvollständige Bewerbungen nicht berücksichtigt werden
[PA/MA] Integration von Life Cycle Assessment in Product Lifecycle Management
Ausgangssituation
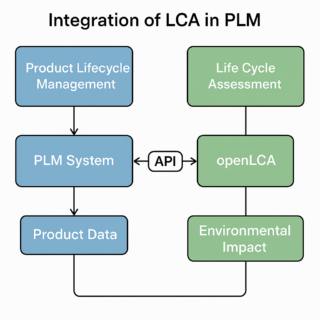
Product Lifecycle Management (PLM) ist ein strategischer Ansatz zur Verwaltung des gesamten Lebenszyklus eines Produkts – von der Konzeption über die Entwicklung, Produktion und Nutzung bis hin zur Entsorgung. Es ermöglicht Unternehmen, Produktinformationen effizient zu steuern und Entwicklungsprozesse zu optimieren. Life Cycle Assessment (LCA) ist eine standardisierte Methode zur Bewertung der Umweltwirkungen eines Produkts über alle Phasen seines Lebenszyklus hinweg, von der Rohstoffgewinnung bis zur Entsorgung. Die Integration von LCA in PLM kann Unternehmen dabei unterstützen, nachhaltigere Produkte zu entwickeln, indem Umweltaspekte frühzeitig in den Entwicklungsprozess einfließen.
Das Ziel dieser Arbeit ist die Entwicklung und Anwendung einer Methodik zur Integration von Life Cycle Assessment (LCA) in Product Lifecycle Management (PLM) unter Verwendung der Open-Source-Software openLCA. Insbesondere soll eine API entwickelt werden, die die Verbindung zwischen openLCA und einem PLM-System ermöglicht, um die Nachhaltigkeit von Produktentwicklungsprozessen zu verbessern. Die Arbeit soll zeigen, wie Umweltwirkungen systematisch in den PLM-Prozess eingebunden werden können, um fundierte Entscheidungen zu treffen, die sowohl ökologische als auch wirtschaftliche Vorteile bieten.
Was ist der Inhalt der Arbeit?
- Literaturrecherche
- Führen Sie eine umfassende Literaturrecherche zu den Themen PLM, LCA und bestehenden Ansätzen zur Integration von LCA in PLM durch.
- Untersuchen Sie spezifisch die Möglichkeiten und Herausforderungen der Integration von openLCA mit PLM-Systemen, einschließlich der Nutzung der openLCA-API.
- Berücksichtigen Sie relevante Standards wie ISO 14040 und ISO 14044 (für LCA) sowie ISO/TR 14062 (für die Integration von Umweltaspekten in die Produktentwicklung).
- Methodikentwicklung
- Entwicklung einer Methodik zur Integration von openLCA in PLM, die auf der Nutzung der openLCA-API basiert.
- Definition von relevanten LCA-Daten, die in das PLM-System übertragen werden sollen (z. B. Umweltbelastungswerte, Materialverbrauch, Energieverbrauch).
- Entwurf einer API, die die Kommunikation zwischen openLCA und einem generischen PLM-System ermöglicht. Die API sollte auf der Grundlage der openLCA-API-Dokumentation entwickelt werden und Datenformate sowie Schnittstellenanforderungen berücksichtigen.
- Berücksichtigung der Machbarkeit der Integration, einschließlich der Anforderungen an Softwaretools, Datenverfügbarkeit und Programmierkenntnisse.
- Fallstudie
- Auswahl eines spezifischen Produkts oder eine Branche (z. B. Haushaltsgeräte) aus, um die entwickelte Methodik anzuwenden.
- Durchführung einer LCA für das ausgewählte Produkt mit openLCA durch, unter Verwendung geeigneter Datenbanken (z. B. Agribalyse, verfügbar über openLCA Nexus).
- Simulation durch die Integration durch den Export von LCA-Daten aus openLCA und die Darstellung, wie diese Daten in ein PLM-System importiert werden könnten, unter Verwendung der entwickelten API. Falls kein Zugang zu einem PLM-System besteht, kann ein generisches PLM-System simuliert werden.
- Demonstration, wie die LCA-Ergebnisse die Design- und Entwicklungsentscheidungen beeinflussen können (z. B. Materialauswahl, Produktionsprozesse).
- Analyse und Bewertung
- Analyse der Ergebnisse der Integration von openLCA in PLM für die Fallstudie.
- Bewertung der Wirksamkeit der entwickelten Methodik und API anhand von Kriterien wie Nachhaltigkeitsverbesserung, Machbarkeit und Einfluss auf die Produktentwicklung.
- Identifikation von Herausforderungen, die während der Integration auftraten (z. B. Datenkompatibilität, Programmieraufwand), und schlagen Sie Lösungen vor, wie diese überwunden werden können.
- Zusammenfassung und Empfehlungen
- Zusammenfassung der wichtigsten Ergebnisse der Arbeit, einschließlich der Erkenntnisse aus der Fallstudie.
- Ableitung von Empfehlungen für die praktische Anwendung der entwickelten Methodik und API sowie für zukünftige Forschungen, z. B. zur Skalierung der Integration in größeren Unternehmensumgebungen oder zur Nutzung moderner Ansätze wie digitaler Zwillinge.
Was bringst du mit?
- Interesse an Nachhaltigkeit
- Interesse an PLM und LCA
- API-Programmierkenntnisse
- Strukturiertes, lösungsorientiertes und wissenschaftliches Arbeiten
- Deutsch und Englisch in Wort und Schrift
Weitere Informationen und Details sind beim genannten Mitarbeiter erhältlich. Eine Bearbeitung ist ab sofort möglich. Bewerbungen senden Sie bitte mit aktuellem Notenauszug, relevanten Zeugnissen und Lebenslauf per E-Mail. Wir werden uns zeitnah rückmelden
Generative AI in Systems Engineering: Optimization of a framework for an LLM assistance system for model-based and semi-automated development of warehouse systems in MBSE
LLM-SE research project
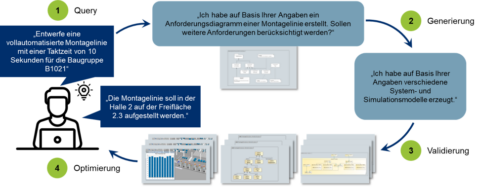
As part of the LLM-SE (Large Language Model supported Systems Engineering) research project, we are working with our industry partners to develop an assistance system based on the MBSE philosophy and structure using large language models to partially automate the engineering process of warehouse technology and concepts from requirements analysis to virtual commissioning. This should interpret user input such as requirements and adaptations, transform them into individual, model-based solutions through the availability of company-specific product catalogs, historical project data and best practices and secure these through suitable validation and verification mechanisms.
Your tasks in the project
- Literature research on the modeling language SysML v2
- Research, evaluation and selection of suitable AI methods and models
- Optimization of the existing framework through the further development of a new microservice that can be integrated with the current service and offers scalable LLM-fine-tuning.
- Collecting data from industry project partners and creating pre-processing pipelines that convert raw data into ALPACA format for model training.
- Creating intuitive user interfaces that allow non-technical users to test, evaluate and refine different base models – for warehouse technologies and concepts – by using different prompts.
- Automatic generation of SysML models for warehouse technologies and concepts through the use of LLMs in the developed framework and the improvement of these models through an interactive behavior of the process engine
- The final result of your work: With the help of the framework, the layouts for different warehouse concepts including the associated warehouse technologies automatically suggested by LLMs for the corresponding material flow technology in the factory should be able to be generated automatically.
Requirements
- Very good programming skills in Python are mandatory
- Very good knowledge and practical experience in RESTful APIs is mandatory
- Very good knowledge of processing data formats such as CSV, JSON, XML and Markdown is mandatory
- Confident handling of containerization technologies such as Docker, Podman
- Practical experience with LLM fine-tuning frameworks, e.g. Unsloth, LlamaFactory is mandatory
- Practical experience with LLM inference optimization engines, e.g. Ollama, Llama.cpp or vLLM is mandatory. e.g. Ollama, Llama.cpp or vLLM is mandatory
- Practical experience with database technologies for SQL, NoSQL, vector and object databases is mandatory
- Basic knowledge of prompt engineering techniques, including one-shot, few-shot and chain-of-thought prompting is an advantage
- Basic knowledge of version control systems e.g. Git is an advantage
- Basic knowledge of front-end development e.g. React, Next.js is an advantage
Application instructions
- Start at the earliest possible date
- Please send applications by e-mail with a current transcript of records and CV as well as a short letter of motivation
- Please note that incomplete applications cannot be considered
- Further information on request by e-mail or in a personal interview
[PA/MA]: Generative KI im Systems Engineering: Optimierung eines Rahmenwerks für ein LLM-Assistenzsystem zur modellbasierten und teilautomatisierten Entwicklung von Lagersystemen im MBSE
Forschungsvorhaben LLM-SE
Im Rahmen des Forschungsprojektes LLM-SE (Large Language Model unterstütztes Systems Engineering) entwickeln wir gemeinsam mit unseren Industriepartnern ein an der MBSE-Philosophie und -Struktur orientiertes Assistenzsystem unter Verwendung von Large Language Models zur Teilautomatisierung des Engineeringprozesses Lagertechnologie und -konzepte von der Anforderungsanalyse bis zur virtuellen Inbetriebnahme. Dieses soll Benutzereingaben wie Anforderungen und Anpassungen interpretieren, durch die Verfügbarkeit von unternehmensspezifischen Produktkatalogen, historischen Projektdaten und Best Practices in individuelle, modellbasierte Lösungen transformieren und diese durch geeignete Validierungs- und Verifikationsmechanismen absichern.
Ihre Aufgabenbereiche im Projekt
- Literaturrecherche zur Modellierungssprache SysML v2
- Recherche, Evaluation und Auswahl geeigneter KI-Methoden und -Modelle
- Optimierung des bestehenden Frameworks durch die Weiterentwicklung eines neuen Mikroservices, der mit den aktuellen Service integriert werden kann und skalierbare LLM-fine-tuning bietet.
- Datensammeln von Projektpartnern aus der Industrie und Erstellen von Vorverarbeitungspipelines, die Rohdaten in das ALPACA-Format für das Modelltraining konvertieren.
- Schaffung intuitiver Benuteroberflächen, die es Benutzern ohne technischen Hintergrund ermöglichen, verschiedene Basismodelle – für Lagertechnologien und -konzepte zu testen, zu bewerten und zu verfeinern, indem sie verschiedene Eingabeaufforderungen verwenden.
- Automatische Generierung von SysML-Modellen für Lagertechnologien und -konzepte durch den Einsatz von LLMs im entwickelten Framework und die Verbesserung dieser Modelle durch ein interatives Verhalten der Process Engine
- Das Endergebnis Ihrer Arbeit: Mithilfe des Frameworks sollen die Layouts für verschiedene Lagerkonzepte inkl. der zugehörigen, durch LLMs automatisch vorgeschlagenen Lagertechnologien für die entsprechende Materialflusstechnik in der Fabrik automatisch generiert werden können.
Anforderungen
- Sehr gute Programmierungskenntnisse in Python sind zwingend erforderlich
- Sehr gute Kenntnisse und praktische Erfahrungen in RESTful APIs sind zwingend erforderlich
- Sehr gute Kenntnisse in der Verarbeitung von Datenformaten wie CSV, JSON, XML und Markdown sind zwingend erforderlich
- Sicheres Umgehen mit Containerisierungstechnologien wie Docker, Podman
- Praktische Erfahrungen mit LLM-Fine-tuning-Frameworks, z. B. Unsloth, LlamaFactory sind zwingend erforderlich
- Praktische Erfahrungen mit LLM-Inferenz-Optimierungsmaschinen, z. B. Ollama, Llama.cpp oder vLLM ist zwingend erforderlich
- Praktische Erfahrungen mit Datenbanktechnologien für SQL-, NoSQL-, Vektor– und Objektdatenbanken sind zwingend erforderlich
- Grundlegende Kenntnisse in Prompt-Engineering-Techniken, einschließlich One-Shot, Few-Shot und Chain-of-Thought-Prompting sind von Vorteil
- Grundlegende Kenntnisse in Versionskontrollsystemen z. B. Git sind von Vorteil
- Grundlegende Kenntnisse in der Front-End-Entwicklung z. B. React, Next.js sind von Vorteil
Hinweise zur Bewerbung
- Beginn zum nächstmöglichen Zeitpunkt
- Bewerbungen bitte per E-Mail mit aktuellem Notenspiegel und Lebenslauf sowie einem kurzen Motivationsschreiben
- Bitte beachten Sie, dass unvollständige Bewerbungen nicht berücksichtigt werden können.
- Weitere Informationen auf Anfrage per E-Mail oder gerne auch in einem persönlichen Gespräch.
Systematische Literaturrecherche zum Einsatz von Wärmeleitmaterial in der Leistungselektronik (BA/PA)
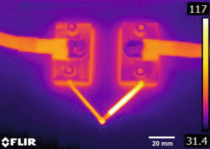
Das Projekt Restladung umfasst die Entwicklung einer kosteneffizienten DC-Wallbox auf Basis einer Ein-Platinen-Lösung und einer passiven Wärmeabfuhr. Das Teilprojekt des FAPS fokussiert neben dem automatisierungsgerechten Produktdesign insbesondere die hochpräzise Montage der Leistungselektronik in das Gehäuse. Besondere Berücksichtigung gilt demnach der optimalen Wärmekopplung beider Komponenten durch den Einsatz von Wärmeleitmaterial.
Die Arbeit beinhaltet folgende Schwerpunkte:
- Einarbeitung in die theoretischen Grundlagen der Wärmeübertragung
- Relevanz der Wärmeableitung
- Materialklassen und Produkte
- Verarbeitungsprozesse
Anforderungen:
- Studium im Bereich Maschinenbau / IPEM / WING / Mechatronik / Elektrotechnik o.Ä.
- Hohe Motivation, Neugierde sowie eine selbständige und strukturierte Arbeitsweise
- Deutsch in Wort und Schrift
Bitte bewerben Sie sich mit einem aktuellen Notenspiegel und Lebenslauf.
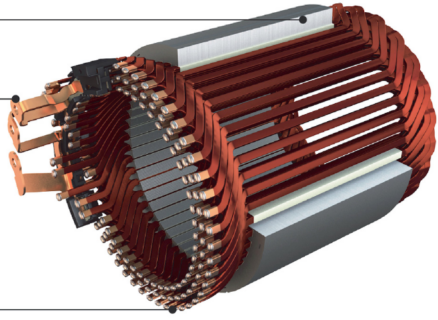
Systematische Literaturrecherche zu Testing-Methoden elektrischer Kontakte eines Schaltrings (BA/PA)
Aufgabenstellung:
Im Kontext der Elektromotorenfertigung für schienengebundene Fahrzeuge haben sich diverse Motorkonzepte etabliert, welche vorwiegend auf massiveren Flachleitern beruhen. Deren Handhabung und Einbringung stellt auf Grund ihrer großen Biegesteifigkeit, gepaart mit der erforderlichen Formgebung, eine große Herausforderung dar. Auf Grund vergleichsweise geringen Stückzahlen werden gegenwärtig elementare Prozessschritte manuell umgesetzt. Deren Automatisierung stellt eine große Herausforderung innerhalb der Transformation der Mobilität im 21. Jahrhundert dar.
Ziel dieser studentischen Arbeit ist es, verschiedene Messmethoden für elektrische Kontakte im Kontext elektrischer Antriebe zu recherchieren und miteinander zu vergleichen. Neben einer grundlegenden Einarbeitung in die Themen Messtechnik und Kontaktierung sollen nach der strukturierten Literaturrecherche die Erkenntnisse auf das Anwendungsbeispiel eines Schaltrings für die Kontaktierung elektrischer Antriebe von schienengebundenen Fahrzeugen übertragen werden.
Die Arbeit beinhaltet folgende Schwerpunkte:
- Einarbeitung in den Kontaktierungsprozess von Elektromotoren
- Einordnung des Prozesses in die Fertigung
- Übersicht über Kontaktierungsverfahren
- Vorteile und Herausforderungen in der Fertigung
- Einarbeitung in den Themenkomplex Messtechnik
- Strukturierte Literaturanalyse zu Messmethoden elektrischer Kontakte im Kontext von Elektromotoren
- Identifikation und Kategorisierung wichtiger Kenngrößen für Kontaktstellen
- Vorstellung der wichtigsten Verfahren zur Messung dieser Kenngrößen
- Vergleich der Messverfahren anhand geeigneter Auswahlkriterien
- Begründung der Bewertung
- Übertrag der Erkenntnisse auf das Anwendungsbeispiel eines Schaltrings im Kontext elektrischer Traktionsantriebe
- Erarbeitung und Konzeptionierung weiterer Messmethoden für das Anwendungsbeispiel
Persönliche Voraussetzungen:
- Interesse an Fertigungsprozessen im Bereich Elektromaschinen
- Grundlegende Kenntnisse der Funktionsweise und des Aufbaus eines E-Motors
- Strukturiertes, lösungsorientiertes und wissenschaftliches Arbeiten
- Erste Erfahrungen im Bereich Kontaktierung und Messtechnik sind wünschenswert
- Deutsch und Englisch in Wort und Schrift
Weitere Informationen und Details sind bei Felix Wirthmann erhältlich. Eine Bearbeitung ist ab sofort möglich. Bewerbungen senden Sie bitte mit Notenauszug und Lebenslauf per E-Mail an den oben genannten Betreuer. KI-generierte, generische und fachlich unpassende Bewerbungen erhalten keine Rückmeldung.
Konzeption und Validierung der Kontaktierung eines Schaltrings für schienengebundene Fahrzeuge (BA/PA/MA)
Aufgabenstellung:
Im Kontext der Elektromotorenfertigung für schienengebundene Fahrzeuge haben sich diverse Motorkonzepte etabliert, welche vorwiegend auf massiveren Flachleitern beruhen. Deren Handhabung und Einbringung stellt auf Grund ihrer großen Biegesteifigkeit, gepaart mit der erforderlichen Formgebung, eine große Herausforderung dar. Auf Grund vergleichsweise geringen Stückzahlen werden gegenwärtig elementare Prozessschritte manuell umgesetzt. Deren Automatisierung stellt eine große Herausforderung innerhalb der Transformation der Mobilität im 21. Jahrhundert dar.
Ziel dieser studentischen Arbeit ist es, verschiedene Designideen für die Kontaktelemente eines Schaltrings im Kontext von Traktionsmotoren schienengebundener Fahrzeugs zu erarbeiten und miteinander zu vergleichen. Neben der Einarbeitung in das Themengebiet sollen bestehende und eigene Kontaktelementformen durchdacht, bewertet und anhand von geeigneten Tests die besten Kontaktelemente validiert werden.
Die Arbeit beinhaltet folgende Schwerpunkte:
- Einarbeitung in die Statorfertigung für Schienenfahrzeuge
- Einarbeitung in die Thematik Schaltringe
- Vorteile und Herausforderungen in der Fertigung
- Einarbeitung in den Kontaktierungsprozess
- Übersicht über Kontaktierungsverfahren
- Vorteile und Herausforderungen in Zusammenhang mit Schaltringen
- Erarbeitung verschiedener Kontaktelementformen
- Vergleich der erarbeiteten Varianten
- Bewertung der Kontaktelemente anhand geeigneter Auswahlkriterien
- Begründung der Bewertung
- Teil-Validierung der Kontaktelementform
Persönliche Voraussetzungen:
- Interesse an Fertigungsprozessen im Bereich Elektromaschinen
- Grundlegende Kenntnisse der Funktionsweise und des Aufbaus eines E-Motors
- Strukturiertes, lösungsorientiertes und wissenschaftliches Arbeiten
- Erste Erfahrungen im Bereich Kontaktierung
- Deutsch und Englisch in Wort und Schrift
Weitere Informationen und Details sind bei Felix Wirthmann erhältlich. Eine Bearbeitung ist ab sofort möglich. Bewerbungen senden Sie bitte mit Notenauszug und Lebenslauf per E-Mail an den oben genannten Betreuer. KI-generierte, generische und fachlich unpassende Bewerbungen erhalten keine Rückmeldung.
[PA/MA] Kontaktierung von primärisolierten HF-Litzen aus Aluminium mit Aluminiumkabelschuhen für induktive Ladepads (ab Nov/Dez)

Ausgangssituation:
Induktive Ladepads für elektrische Fahrzeuge erfordern hochzuverlässige und effiziente Kontaktierungen, insbesondere bei der Verwendung von primärisolierten HF-Litzen aus Aluminium. Aluminium bietet Vorteile wie geringes Gewicht und gute Leitfähigkeit, stellt jedoch besondere Anforderungen an die Kontaktierung aufgrund seiner Oxidationsanfälligkeit und mechanischen Eigenschaften. Ziel ist es, die Machbarkeit und Zuverlässigkeit der Kontaktierung zu demonstrieren.
Der Umfang der Arbeit umfasst dabei folgende Arbeitsinhalte:
-
Literaturrecherche: Untersuchung bestehender Kontaktierungstechniken für Aluminiumlitzen.
-
Konzeptentwicklung: Proof of Concept, der die Kontaktierung von HF-Litzen qualifiziert.
- Versuchsdurchführung: Testen der Kontaktierungen unter realistischen Bedingungen (z. B. Temperaturzyklen, Strombelastung) und Bewertung der elektrischen und mechanischen Stabilität.
-
Dokumentation: Auswertung der Ergebnisse und Erstellung einer detaillierten Dokumentation einschließlich Empfehlungen für die weitere Entwicklung.
Voraussetzungen zur Bewerbung:
-
Fachkenntnisse: Grundkenntnisse in Elektrotechnik und Materialwissenschaften, sowie Interesse an experimenteller Arbeit.
- Arbeitsweise: Selbstständige, strukturierte und präzise Arbeitsweise sowie Teamfähigkeit.
-
Sprachkenntnisse: Gute Deutschkenntnisse in Wort und Schrift; Englischkenntnisse sind von Vorteil für die Literaturrecherche.
Bewerbungen mit Lebenslauf und aktuellem Notenspiegel bitte per E-Mail an:
Sollten Sie in die engere Auswahl kommen, werden Sie per Mail kontaktiert. Ein Anruf ist nicht notwendig.
[BA/PA] Aufbau eines Versuchsstandes zur Kontaktierung von primärisolierten HF-Litzen

Ausgangssituation:
Hochfrequenzlitzen (HF-Litzen) werden in zahlreichen Anwendungen der Elektromobilität, eingesetzt, um Skin- und Proximity-Effekte zu minimieren. Eine Herausforderung besteht in der zuverlässigen Kontaktierung primärisolierter HF-Litzen. In diesem Kontext soll ein innovativer Ansatz verfolgt werden, bei dem die Litze induktiv erwärmt wird, um die Isolierung thermisch zu entfernen, während sie gleichzeitig mechanisch verpresst wird. Ziel ist es, einen Versuchsstand zu entwickeln, der diesen Prozess ermöglicht und die Kontaktqualität systematisch untersucht.
Der Umfang der Arbeit umfasst dabei folgende Arbeitsinhalte:
- Literaturrecherche: Untersuchung bestehender Methoden zur Kontaktierung von HF-Litzen und Analyse relevanter Technologien für induktive Erwärmung und mechanische Verpressung.
- Konzeptentwicklung: Entwurf eines Versuchsstandes, der die simultane thermische Abisolierung und mechanische Verpressung von HF-Litzen ermöglicht.
- Aufbau des Versuchsstandes: Konstruktion und Implementierung des Versuchsstandes, einschließlich der Auswahl geeigneter Komponenten für die induktive Erwärmung und Verpressung.
- Durchführung von Versuchen: Testen und Optimierung der Prozessparameter (z. B. Temperatur, Presskraft).
- Auswertung und Dokumentation: Analyse der Versuchsergebnisse hinsichtlich der Kontaktqualität (z. B. elektrischer Widerstand, mechanische Stabilität) und Erstellung einer umfassenden Dokumentation.
Nähere Informationen sowie Beginn und Umfang der Arbeit können in einem persönlichen Gespräch diskutiert werden. Eine Konkretisierung des Themas erfolgt nach Absprache.
Voraussetzungen zur Bewerbung:
- Fachkenntnisse: Grundkenntnisse sowie Interesse an experimenteller Arbeit und Konstruktion.
- Technische Fähigkeiten: Erfahrung im Umgang mit CAD-Software von Vorteil.
- Arbeitsweise: Selbstständige, strukturierte und sorgfältige Arbeitsweise sowie Freude an praktischer und theoretischer Arbeit.
- Sprachkenntnisse: Gute Deutschkenntnisse in Wort und Schrift; Englischkenntnisse sind von Vorteil für die Literaturrecherche.
Bewerbungen mit Lebenslauf und aktuellem Notenspiegel bitte per E-Mail an:
Sollten Sie in die engere Auswahl kommen, werden Sie per Mail kontaktiert. Ein Anruf ist nicht notwendig.