Index
[MA] Validierung und Erweiterung einer ontologiebasierten Wissensdatenbank für CubeSat-Missionstypen und Komponentenkompatibilität
Ausgangssituation
Im Rahmen der zunehmenden Diversifizierung von CubeSat-Anwendungen hat sich die Notwendigkeit ergeben, ein strukturiertes Wissensmanagement für die Kompatibilität verschiedener Missionstypen mit den entsprechenden Satellitenkomponenten zu etablieren. Die bisher entwickelte hierarchische, dokumentenorientierte Wissensbasis bietet eine erste Grundlage für einen CubeSat-Konfigurator, der Nutzern die systematische Auswahl von Komponenten basierend auf ihren Missionsanforderungen ermöglichen soll. Diese Wissensbasis muss jedoch hinsichtlich ihrer Vollständigkeit und Validität kritisch überprüft und erweitert werden, um einen zuverlässigen Konfigurationsprozess zu gewährleisten.
Die bestehende Taxonomie enthält bereits eine hierarchische Klassifikation von Missionstypen (wissenschaftliche, kommerzielle und verteidigungsorientierte Missionen) sowie eine strukturierte Kategorisierung von Satellitenkomponenten (Bus-Systeme, Nutzlastsysteme). Eine Kompatibilitätsmatrix definiert die Beziehungen zwischen diesen Elementen als “erforderlich”, “optional” oder “inkompatibel”. Diese Struktur bildet die Grundlage für einen wissensbasierten Ansatz zur CubeSat-Konfiguration, bedarf jedoch einer umfassenden wissenschaftlichen Validierung und Ergänzung.
Aufgabenstellung
Im Rahmen dieser Masterarbeit sollen folgende Schwerpunkte untersucht und erarbeitet werden:
- Systematische Literaturrecherche zur Validierung der existierenden Missionstypen und Identifikation weiterer relevanter Missionsszenarien für CubeSats
- Erstellung einer vollständigen Komponententaxonomie für moderne CubeSat-Missionen unter Berücksichtigung aktueller technologischer Entwicklungen und Standards
- Identifikation kritischer Kompatibilitätsbeziehungen und deren Begründungen, insbesondere bei inkompatiblen Komponenten-Missions-Kombinationen
- Erweiterung der Wissensbasis um Leistungsparameter und quantitative Anforderungsprofile für verschiedene Missionstypen
- Entwicklung einer Methodik zur kontinuierlichen Aktualisierung der Wissensbasis bei technologischen Fortschritten
- Evaluation des erweiterten Modells hinsichtlich seiner Vollständigkeit, Konsistenz und Anwendbarkeit für einen automatisierten Konfigurationsprozess
- Strukturierte Dokumentation der Arbeit und der erzielten Ergebnisse
Vorkenntnisse und Voraussetzungen
- Grundkenntnisse im Bereich Raumfahrttechnik und CubeSat-Technologie
- Analytisches Denkvermögen und strukturierte Arbeitsweise
- Gute Kenntnisse wissenschaftlicher Recherchemethoden
- Gute Deutsch- oder Englischkenntnisse
- Selbstständige und zielgerichtete Arbeitsweise
Empfohlene Literatur zur Vorbereitung
- Bouzoukis, K.-P., Moraitis, G., Kostopoulos, V., Lappas, V. (2024). “An Overview of CubeSat Missions and Applications” — Open‑Access Review. Applied Mechanics Laboratory.
https://www.mdpi.com/2226-4310/12/6/550 - Poghosyan, A., & Golkar, A. (2017). “CubeSat evolution: Analyzing CubeSat capabilities for conducting science missions”. Progress in Aerospace Sciences, 88, 59-83. https://www.sciencedirect.com/science/article/pii/S0376042116300951
Beginn
- Ab sofort möglich
Sonstiges
- Bearbeitung der Arbeit kann größtenteils im Home-Office erfolgen
- Regelmäßige Abstimmung mit dem Projektteam erforderlich
- Zugang zu relevanten Fachdatenbanken und Expertennetzwerken wird ermöglicht
Bewerbung
- Email an julius.pinsker@faps.fau.de mit Lebenslauf, Notenspiegel und kurzem Motivationsschreiben (max. 1 Seite)
[BA/PA/MA] Lösung kombinatorischer Optimierungsprobleme in flexiblen Fertigungsanlagen durch Verfahren des maschinellen Lernens
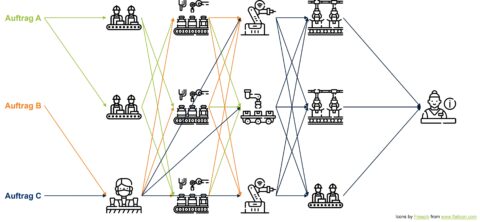
Die Anforderungen an Fertigungsanlagen entwickeln sich zunehmend in Richtung Flexibilisierung und Personalisierung fort, um individuellen Kundenwünschen gerecht zu werden. In diesem Kontext gewinnt das Flexible Job-Shop Scheduling Problem an Bedeutung: Es beschreibt die Herausforderung, verschiedene Aufträge mit mehreren Arbeitsschritten auf wechselnde Maschinen so zu planen, dass alle Schritte in möglichst optimaler Reihenfolge bearbeitet werden. Im Gegensatz zu starren Systemen können einzelne Arbeitsschritte dabei auf unterschiedlichen Maschinen ausgeführt werden. Ziel ist es, die Produktionszeit zu minimieren und die Nutzung der Maschinen optimal zu gestalten, um den komplexen Anforderungen moderner Fertigung gerecht zu werden.
Da es sich beim Flexible Job-Shop Scheduling Problem um ein kombinatorisches Optimierungsproblem handelt, das in Abhängigkeit der Größe der Produktionsanlage sehr komplex werden kann, bietet sich für eine dynamische Lösungsfindung die Methodik des Multi-Agent Reinforcement Learnings (MARL) an.
Ziel dieser Arbeit ist es, ein Scheduling Problem einer simulierten Produktionsanlage durch Entwicklung und Training eines Muli-Agent Reinforcement Learning Systems zu lösen.
Deine Aufgaben:
- Einarbeitung in den Stand der Technik zum Lösen des Flexibel Job-Shop Scheduling Problems und MARL
- Mathematische Beschreibung des Problems
- Erstellung einer Simulation einer Fertigungsanlage als Trainingsumgebung
- Konzeptionierung eines MARL-Systems
- Umsetzung und Training des MARL-Systems
- Validierung des Systems als flexiblen Scheduler
Dein Profil:
- Fortgeschrittene Programmierkenntnisse
- Affinität für maschinelles Lernen und dessen Anwendung in der Produktion
- Strukturierte, selbstständige Arbeitsweise
Voraussetzungen:
Für diese Arbeit werden ein sicherer Umgang mit Python sowie Vorerfahrungen im Trainieren von RL-Modellen vorausgesetzt. Bitte stellt in Eurer Bewerbung dar, wie ihr diese Voraussetzungen erfüllt.
Die Arbeit kann ab sofort bearbeitet werden. Bewerbung bitte per Mail mit Lebenslauf und aktuellem Notenauszug an untenstehenden Kontakt richten.
Integration von Wirbelstrommesstechnik in den Richtprozess der Hairpin-Stator-Produktion und Analyse von Prozesskorrelationen

Inmitten des wachsenden Spektrums elektrischer Antriebstechnologien – vom etablierten Hairpin-Motor bis hin zu aufstrebenden Varianten wie Continuous Hairpin, Hairpins aus Hohlleitern oder Litzen und Axialflussmaschinen – steht das Richten von Flachdraht als zentraler Prozessschritt im Fokus. Die gegenwärtige Herausforderung im industriellen Umfeld liegt in der Steuerung dieses Prozesses, der bisher auf statischen Parametern und dem empirischen Wissen von Facharbeitern basiert und Schwankungen im Eingangsmaterial nur unzureichend berücksichtigt.
Zielsetzung:
Im Rahmen aktueller Forschungsaktivitäten am Lehrstuhl FAPS soll der Prozessschritt des Richtens von Flachdraht durch die Integration eines inlinefähigen Wirbelstrommessgeräts weiterentwickelt werden. Das Ziel ist es, Materialeigenschaften (z. B. Leitfähigkeit, Härteänderungen) während des Richtens zu erfassen, Messreihen aufzunehmen und die gewonnenen Daten mit bestehenden Prozess- und Qualitätskennwerten zu korrelieren. Daraus sollen Erkenntnisse über Zusammenhänge zwischen Materialeigenschaften, Richtparametern und finaler Bauteilqualität gewonnen werden, die eine Grundlage für innovative Regelungsansätze bilden.
Mögliche Aufgabenstellungen:
-
Planung und mechanische/elektrische Integration eines Wirbelstrommessgeräts in den bestehenden Richtprozess
-
Durchführung von Versuchsreihen unter Variation relevanter Prozessparameter
-
Aufzeichnung, Aufbereitung und Analyse der Messdaten
-
Untersuchung möglicher Korrelationen mit bestehenden Messwerten (z. B. Geometrie, Richtkräfte, Prozesskräfte)
-
Ableitung von Handlungsempfehlungen für eine adaptive Prozessführung
-
Optionale Erweiterung: KI-gestützte Analyse der Messdaten zur Erkennung von Mustern oder Anomalien
Mögliche Themengebiete:
-
Planung und Konstruktion von Anlagenkomponenten
-
Implementierung und Validierung von Messsystemen
-
Planung und Durchführung von experimentellen Untersuchungen
-
Datenanalyse und Modellbildung
-
Entwicklung von Regelungskonzepten für den Richtprozess
Anforderungsprofil:
-
Interesse an der Produktion elektrischer Traktionsantriebe
-
Je nach Themengebiet: Grundkenntnisse in Messtechnik, Signalverarbeitung, Werkstoffkunde, Programmierung, Datenanalyse (KI/ML) oder Regelungstechnik
-
Freude an praktischer Arbeit wie z. B. Integration von Sensorik, Durchführung und Auswertung von Versuchsreihen
-
Analytisches Denkvermögen sowie selbstständige, gewissenhafte und strukturierte Arbeitsweise
-
Teamfähigkeit und Kommunikationsstärke
-
Gute Deutsch- und Englischkenntnisse in Wort und Schrift
Bewerbung:
Bitte senden Sie Ihre Bewerbung mit Lebenslauf, aktuellem Notenspiegel und Angabe des bevorzugten Themengebiets an anja.preitschaft@faps.fau.de.
[BA/PA/MA]: KI-gestützte Qualitätsprüfung bei der Verdrahtung von Push-In-Komponenten

Hintergrund:
Die Verdrahtung von Push-In-Komponenten stellt einen wichtigen Schritt in der Schaltschrankmontage dar. Bisher wird die Qualität der Verdrahtung meist nur durch manuelle Prüfungen wie Zugtests überprüft. Mit dem Einsatz von Robotern besteht jedoch die Möglichkeit, bereits während des Verdrahtungsprozesses Kräfte und Momente zu erfassen und diese für eine automatisierte Qualitätsprüfung auszuwerten.
Ziel der Arbeit:
Ziel dieser Arbeit ist es, durch Kraft- und Momentenverläufe während der Verdrahtung Aussagen über die Qualität der Verbindung abzuleiten. Hierfür soll ein KI-Modell entwickelt werden, das fehlerhafte Verdrahtungen erkennt. Die Ergebnisse sollen durch Zugprüfungen validiert und Grenzwerte für eine sichere Verdrahtung ermittelt werden.
Aufgabenstellung:
-
Literaturrecherche zu Methoden der Qualitätsüberwachung bei Push-In-Verbindungen
-
Durchführung von Verdrahtungsversuchen mit einem Roboter und Aufzeichnung der Kraft- und Momentenverläufe
-
Speicherung und Aufbereitung der Daten zur Analyse
-
Entwicklung und Training eines KI-Modells zur Klassifikation korrekter und fehlerhafter Verdrahtungen
-
Validierung der Ergebnisse durch Zugtests und Ermittlung von Schwellenwerten
-
Dokumentation und Präsentation der Ergebnisse
Voraussetzungen:
-
Interesse an Robotik und automatisierter Montage
-
Kenntnisse in Python und Datenanalyse
-
Erste Erfahrungen mit KI-Methoden wünschenswert
-
Strukturierte und eigenverantwortliche Arbeitsweise
Weitere Hinweise:
-
Startdatum ab sofort möglich
-
Praktische Versuche vor Ort notwendig
-
Arbeitsumfang anpassbar (BA/PA/MA)
-
Bewerbung mit aktuellem Notenspiegel und Lebenslauf
[BA/PA/MA]: Untersuchung der Genauigkeit von Zielposenberechnungen mit Aruco-Markern für automatisierte Montageprozesse in der Schaltschrankfertigung
Hintergrund:
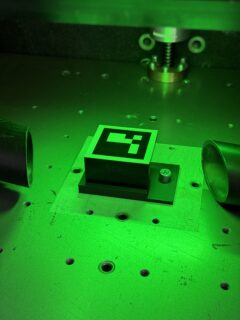
Zur automatisierten Montage und Verdrahtung von Schaltschränken wird eine 2D-Kamera in Kombination mit Aruco-Markern eingesetzt, die am Roboterhandgelenk angebracht ist. Die Genauigkeit der Posenberechnung ist dabei entscheidend für eine präzise Montage. Verschiedene Einflussgrößen wirken sich auf die Bestimmung der Zielpose aus, deren systematische Untersuchung bisher fehlt.
Ziel der Arbeit:
Ziel dieser Arbeit ist es, die Genauigkeit der Aruco-basierten Zielposenbestimmung zu untersuchen und geeignete Methoden zu entwickeln, um diese zu verbessern. Besonderes Augenmerk liegt auf dem Vergleich von One-Shot- und Double-Shot-Aufnahmen, mit dem Ziel, eine Genauigkeit von < 1 mm zu erreichen.
Aufgabenstellung:
-
Literaturrecherche zu Aruco-basierten Posenberechnungen und Einflussgrößen
-
Aufstellung eines Versuchsplans zur Untersuchung der Genauigkeit
-
Durchführung von Experimenten mit unterschiedlichen Aufnahmeverfahren (One-Shot vs. Double-Shot)
-
Entwicklung und Umsetzung von Ansätzen zur Genauigkeitssteigerung
-
Dokumentation der Ergebnisse und Bewertung der Einsatzmöglichkeiten
Voraussetzungen:
-
Kenntnisse in Bildverarbeitung und Computer Vision (OpenCV von Vorteil)
-
Grundkenntnisse in Robotik und Programmierung (Python)
-
Selbstständige und analytische Arbeitsweise
-
Interesse an praktischen Versuchsaufbauten
Weitere Hinweise:
-
Startdatum ab sofort möglich
-
Durchführung der Versuche vor Ort erforderlich, Auswertung im Homeoffice möglich
-
Arbeitsumfang anpassbar (BA/PA/MA)
-
Bewerbung mit aktuellem Notenspiegel und Lebenslauf
[BA/PA/MA]: Analyse und KI-gestützte Auswertung von Kraftverläufen bei der Montage von Reihenklemmen

Hintergrund:
In der Schaltschrankfertigung spielt die zuverlässige Montage von Reihenklemmen eine zentrale Rolle. Unterschiedliche Bauformen und Hersteller weisen dabei variierende Montagekräfte auf, die bisher kaum systematisch erfasst wurden. Für eine automatisierte Montage ist es daher entscheidend, die Kraftverläufe beim Montieren zu verstehen, zu dokumentieren und mithilfe intelligenter Verfahren auszuwerten.
Ziel der Arbeit:
Ziel dieser Arbeit ist die Entwicklung einer Versuchsumgebung, mit der Kraftverläufe bei der Montage von Reihenklemmen erfasst und analysiert werden können. Auf dieser Basis soll zudem ein KI-Modell entwickelt werden, das die Kraftverläufe automatisiert auswertet und charakteristische Parameter für eine sichere Montage identifiziert.
Aufgabenstellung:
-
Recherche bestehender Methoden zur Messung und Analyse von Montagekräften
-
Erstellung eines Versuchsplans zur Untersuchung unterschiedlicher Reihenklemmentypen und Hersteller
-
Entwicklung eines Programms zur Aufzeichnung und Speicherung von Kraftverläufen
-
Analyse der Daten (z. B. maximale Kraft, Verlaufsmuster) und Training eines KI-Modells
-
Dokumentation der Ergebnisse und Ableitung praxisnaher Empfehlungen
Voraussetzungen:
-
Grundkenntnisse in Messtechnik und Programmierung (Python)
-
Interesse an Datenanalyse und KI-Methoden
-
Selbstständige und strukturierte Arbeitsweise
-
Erste Erfahrungen mit Machine Learning Frameworks (z. B. TensorFlow, PyTorch) von Vorteil
Weitere Hinweise:
-
Startdatum ab sofort möglich
-
Homeoffice teilweise möglich
-
Arbeitsumfang anpassbar (BA/PA/MA)
-
Bewerbung mit aktuellem Notenspiegel und Lebenslauf
BA/PA/MA: Optimierung der Roboterpose mit Hilfe von Quantencomputern
Ausgangssituation und Beschreibung
In der industriellen Robotik entscheidet die Wahl der Roboterpose über Energieverbrauch, Präzision und Kollisionsfreiheit. Mit steigender Komplexität stoßen klassische Optimierer zunehmend an Grenzen, da die Lösungsräume teils exponentiell anwachsen und die Integration zahlreicher Nebenbedingungen oft zu Rechenengpässen auf klassischer Hardware führt. Quantenbasierte Optimierungsverfahren (z. B. QAOA, VQE oder Quantum Annealing) bieten hier neue Möglichkeiten, die Pose durch einen Quantenschaltkreis darzustellen und anschließend effizienter zu lösen.
Im Zuge dieses Projekts sollen zunächst etablierte Methoden zur Quantenoptimierung der Roboterpose untersucht, praktisch erprobt, verglichen und anschließend erweitert werden (neue/größere Anwendungsfälle, weitere Algorithmen, …). Ziel ist es, zu untersuchen, inwieweit Quantenverfahren zu einer effizienteren und robusteren Auswahl von Posen beitragen können und ob dadurch qualitativ bessere Ergebnisse im Vergleich zu klassischen Methoden erzielt werden. Zudem ist die Erstellung einer wiederverwendbaren und modular erweiterbaren Anwendung, die als Grundlage für künftige Forschungs- und Industrieprojekte dienen kann wichtig.
Vorkenntnisse und Anforderungen
-
Sehr gute Deutsch- oder Englischkenntnisse
-
Selbstständige, strukturierte Arbeitsweise und sichere Literaturrecherche
-
Gute Python-Skills
-
Grundkenntnisse in Optimierung/OR oder Robotik von Vorteil
-
(Optional, vorteilhaft) Erfahrung mit Quantencomputing
Bewerbung
Bitte senden Sie Ihre aussagekräftigen Unterlagen (Lebenslauf und vollständige Notenübersicht) per E-Mail ein.
BA/PA/MA: Analyse und Modellierung der chemischen Vernetzung von 2K-Silikon
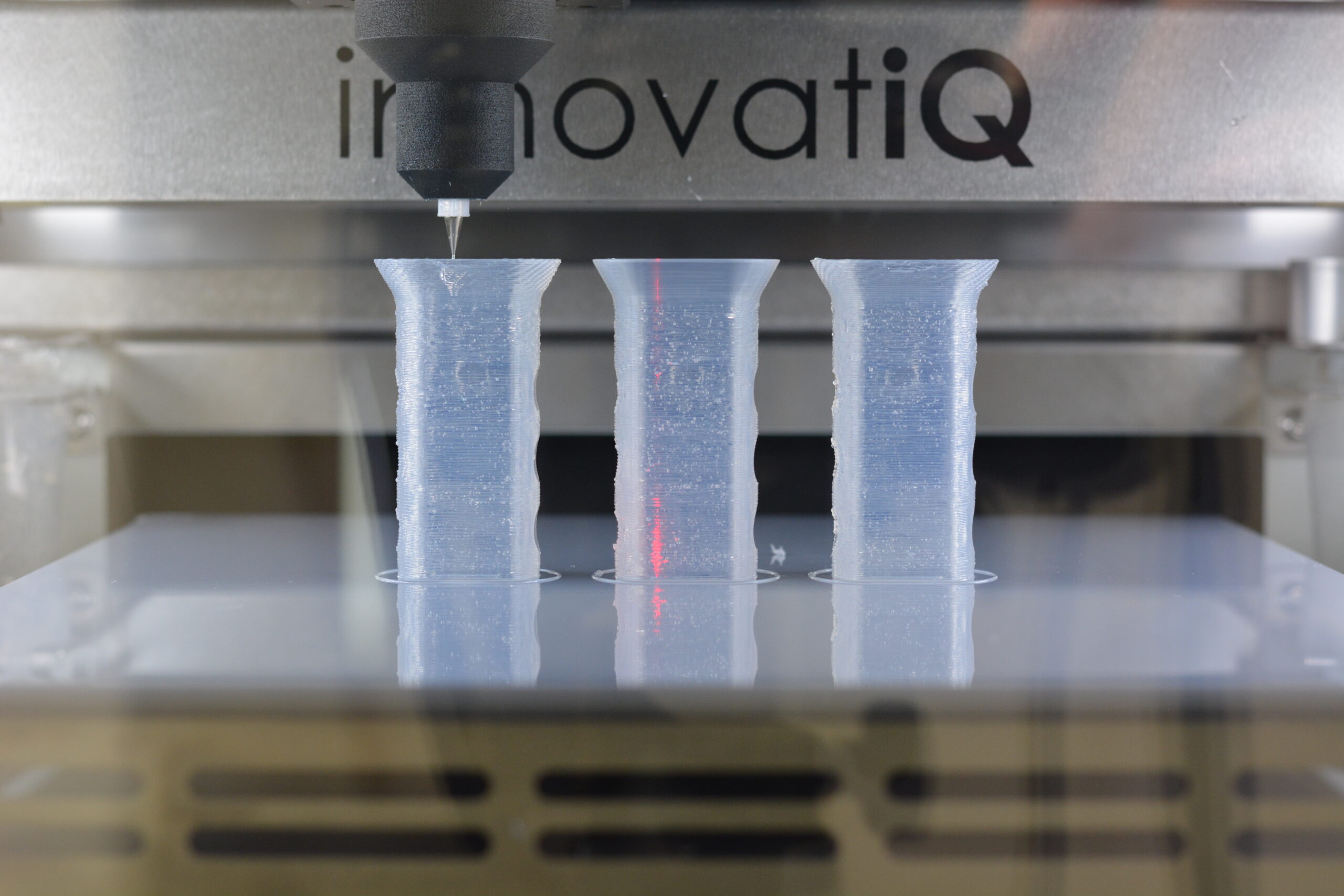
Sowohl im Maschinenbau als auch in der Medizintechnik finden Silikonbauteile aufgrund ihrer besonderen Materialeigenschaften, wie Temperaturstabilität, Biokompatibilität und Flexibilität, breite Anwendung. Zur individualisierten Herstellung von Silikonbauteilen werden bisher hauptsächlich aufwendige indirekte Gussverfahren genutzt. Neuartige additive Verfahren, der direkte Silikondruck, besitzen das Potenzial, die Fertigung zu vereinfachen, komplexe Geometrien zu ermöglichen und eine wirtschaftliche Produktion ab Losgröße eins umzusetzen. Am Lehrstuhl FAPS werden die innovativen Verfahren Direct Ink Writing (DIW) und Liquid Additive Manufacturing (LAM) für die Herstellung von Silikonbauteilen eingesetzt und erforscht.
Im Rahmen dieser studentischen Arbeit wird das Vernetzungsverhalten von 2K Silikonkautschuk charakterisiert, analysiert und modelliert. Dafür werden DSC- und Rheometrie-Messdaten bereinigt und aufbereitet. Die Daten werden danach grafisch aufbereitet und ermöglichen die Ermittlung von Materialkennwerten.
Diese Arbeit bietet die Möglichkeit, in ein aktuelles und fortschrittliches Forschungsgebiet im Schnittpunkt zwischen Materialwissenschaft und Maschinenbau einzutauchen und den Einsatz von modernen Technologien in der Fertigung kennenzulernen. Eigene Ideen können umgesetzt und in der Praxis angewendet werden.


Aufgaben:
- Literaturrecherche zum Stand der Forschung in der Datenerfassung und -aufbereitung
- Aufbereitung und Analyse von Versuchsdaten
- Übertragung der Ergebnisse auf ein Vernetzungsmodell
- Modellvalidierung über Materialcharakterisierungsversuche
- Dokumentation und Präsentation der Ergebnisse
Vorkenntnisse:
- Studium im Bereich Maschinenbau/Mechatronik/Medizintechnik/Elektrotechnik oder ähnliches
- Vorerfahrung im Bereich der Datenverarbeitung in Origin wünschenswert
- Interesse an der additiven Fertigung und Materialwissenschaften
- Sehr engagierte, selbstständige und zuverlässige Arbeitsweise
Bewerbungen mit Lebenslauf, Notenspiegel und sehr knappem Motivationsschreiben (maximal 80 Wörter) bitte über das Anfrageformular oder an Lukas.Gugel@faps.fau.de
BA/PA/MA: Entwicklung einer echtzeitfähigen XAI-Methodik für das autonome Fahren
Ausgangssituation:
Moderne mobile Arbeitsmaschinen stellen durch hohe Antriebsleistungen und Einsatzgewichte besondere Anforderungen an eine sichere und robuste Automatisierungstechnik. Die langjährige Analyse physikalischer Effekte auf mechatronische Komponenten ermöglicht den Einsatz vielfältiger Sensorsysteme zur Erfassung von Umgebungsinformationen. Die Verarbeitung dieser umfangreichen Datenmengen erfolgt zunehmend durch künstliche neuronale Netze. Allerdings stehen aktuelle Technologien vor der Herausforderung, diese Netze robust, sicher und effizient zu gestalten.

Aufgabenschwerpunkte:
-
Einarbeitung in den Stand der Technik zu autonomen mobilen Systemen und künstlicher Intelligenz
-
Untersuchung und Evaluierung von bestehende Methoden zur Steigerung von Robustheit und Transparenz
- Entwicklung einer echtzeitfähigen & leistungsfähigen Methodik
-
Nutzung von Tools und Frameworks zur Umsetzung dieser Methodik in einem mobilen Robotersystem (ROS2, PyTorch)
-
Statistische Auswertung der Ergebnisse anhand branchenüblicher Metriken
-
Strukturierte Dokumentation und Präsentation der Ergebnisse
Vorkenntnisse:
- Interesse an autonomen Fahrzeugen und neuronalen Netzen
- Interesse an Datenauswertung und KI-Architekturen
- Grundlegende Programmierkenntnisse in Python, C++ und ROS2 von Vorteil
- Sehr gute Deutsch- und Englisch-Kenntnisse
Der Arbeitsumfang kann entsprechend der Art der Abschlussarbeit angepasst werden.
Bewerbungen ausschließlich per E-Mail mit aussagekräftigen Unterlagen (Lebenslauf, vollständige Notenübersicht)
BA/PA/MA: Entwicklung einer multimodale Sensorfusionsarchitektur für mobile Robotersysteme auf Basis von Transformer-basierten Mid-Level Fusionsarchitekturen
Ausgangssituation:
Moderne mobile Arbeitsmaschinen stellen durch hohe Antriebsleistungen und Einsatzgewichte besondere Anforderungen an eine sichere und robuste Automatisierungstechnik. Die langjährige Analyse physikalischer Effekte auf mechatronische Komponenten ermöglicht den Einsatz vielfältiger Sensorsysteme zur Erfassung von Umgebungsinformationen. Die Verarbeitung dieser umfangreichen Datenmengen erfolgt zunehmend durch künstliche neuronale Netze. Allerdings stehen aktuelle Technologien vor der Herausforderung, diese Netze robust, sicher und effizient zu gestalten.
Aufgabenschwerpunkte:
-
Einarbeitung in den Stand der Technik zu autonomen mobilen Systemen und künstlicher Intelligenz
-
Untersuchung und Evaluierung von bestehende Methoden zur Mid-Level Datenfusion
- Entwicklung einer modularen und skalierbaren Fusionsarchitektur
- Nutzung Tools und Frameworks zur Umsetzung dieser Methodik am Beispiel autonome Arbeitsmaschinen (ROS2, PyTorch)
-
Statistische Auswertung der Ergebnisse anhand branchenüblicher Metriken
-
Strukturierte Dokumentation und Präsentation der Ergebnisse
Vorkenntnisse:
- Interesse an autonomen Fahrzeugen und neuronalen Netzen
- Interesse an Datenauswertung und KI-Architekturen
- Grundlegende Programmierkenntnisse in Python, C++ und ROS2 von Vorteil
- Sehr gute Deutsch- und Englisch-Kenntnisse
Der Arbeitsumfang kann entsprechend der Art der Abschlussarbeit angepasst werden.
Bewerbungen ausschließlich per E-Mail mit aussagekräftigen Unterlagen (Lebenslauf, vollständige Notenübersicht)