Index
Generative KI im Systems Engineering: Prototyp zur virtuellen Inbetriebnahme mit Unity und TIA

Im Rahmen des Forschungsprojekts LLM-SE (Large Language Model unterstütztes Systems Engineering) erforschen wir am Lehrstuhl FAPS innovative Ansätze zur Teilautomatisierung des Engineerings mechatronischer Systeme mithilfe generativer KI. Ziel ist es, komplexe Entwicklungsprozesse – von der Anforderungsanalyse bis zur virtuellen Inbetriebnahme – durch KI-gestützte Assistenzsysteme effizienter und robuster zu gestalten.
Aufgabenbereiche
Wir suchen motivierte Studierende zur Unterstützung bei der Entwicklung eines Demonstrators, der die virtuelle Inbetriebnahme eines mechatronischen Systems ermöglicht. Der Fokus liegt auf der Integration generativer KI-Modelle (z. B. LLMs) zur Unterstützung von Engineering-Aufgaben.
-
Modellerstellung in Unity
-
Erstellung und Kinematisierung des mechatronischen Systems (am Beispiel einer CO2-Neutralen Produktionsanlage am FAPS)
- Integration von Verhaltensmodellen zur Beschreibung von Sensoren und Aktoren
-
-
Anbindung der SPS mit Siemens TIA Portal
-
Entwicklung einer einfachen Steuerungslogik für das System
-
Anbindung der SPS an das Mechatronische Modell
-
-
Erstellung der ECAD-Verbindung
-
Extraktion relevanter Verbindungen zwischen SPS und der Produktionsanlage
-
Ableitung der IO-Strukturen
-
-
Integration generativer KI-Modelle
-
Anbindung eines LLM-Moduls zur teilautomatisierten Modell- oder Codegenerierung
-
Evaluation der KI-gestützten Assistenzfunktionen im Engineering-Prozess
-
Profil
-
Studium in Maschinenbau, Elektrotechnik, Mechatronik, Informatik oder vergleichbar
-
Kenntnisse in Unity (C#), TIA Portal oder EPLAN wünschenswert
-
Interesse an KI, Automatisierung und virtueller Inbetriebnahme
-
Selbstständige und strukturierte Arbeitsweise, Teamfähigkeit sowie gute Kommunikationsfähigkeiten
- Sehr gute Deutsch- und Englischkenntnisse in Wort und Schrift
Was wir bieten
-
Einbindung in ein aktuelles öffentlich gefördertes Forschungsprojekt
-
Hohe Zusammenarbeit mit regionalen Industriepartnern
Beginn
Ab sofort möglich. Die Position ist als Bachelor-, Projekt- oder Masterarbeit verfügbar.
Kontakt
Interessierte Studierende senden bitte ihre Bewerbungsunterlagen (kurzes Motivationsschreiben, Lebenslauf, Notenspiegel) per E-Mail an: martin.barth@faps.fau.de
Weitere Informationen zum Projekt LLM-SE:
LLM-SE auf faps.fau.de
Abschlussarbeit zu autonomen Drohnen

Drohnen werden in unterschiedlichsten Gebieten der Industrie eingesetzt, unter anderem zum Materialtransport in der Intralogistik oder zur Erfassung digitaler Lagebilder.
Für den effizienten und sicheren Einsatz ist es wünschenswert, dass die Drohnen ihre Aufgaben selbstständig erledigen, also autonom agieren. Durch den autonomen Betrieb wird es möglich mithilfe geeigneter Navigation die Drohnen beispielsweise hinsichtlich ihres Energieverbrauchs zu optimieren. Hierfür ist die Erforschung robotischer Infrastrukturen (Robot Operating System 2), Computer-Vision, neuartiger KI-Modelle und Reinforcement Learning erforderlich. Zudem sind Hardwareaspekte, wie ein stabiler Aufbau des Flugroboters sowie die Ausstattung mit entsprechender Sensorik zu beachten.
Am Flugfeld des Lehrstuhl FAPS sind verschiedene Themen für Bachelor- und Masterarbeiten in den oben genannten Bereichen zu vergeben. Voraussetzung ist die Motivation zur selbständigen Einarbeitung in die Programmierung von Flugrobotern. Weitere Informationen erhalten Sie auf Anfrage per E-Mail.
Hinweise zur Bewerbung
- Freude an der Programmierung
- Interesse am Robot Operating System
- Gute Englischkenntnisse erforderlich
- Sehr gute Deutscherkenntnisse erforderlich (mind. C1)
- Selbstständige Arbeitsweise
- Beginn jederzeit möglich
- Bewerbungen bitte per E-Mail mit aktueller Notenübersicht und Lebenslauf
- Bitte beachten Sie, dass unvollständige Bewerbungen nicht berücksichtigt werden
BA/MA: Reinforcement Learning basierte Navigation für autonome Drohnen
Drohnen werden in unterschiedlichsten Gebieten der Industrie eingesetzt, unter anderem zum Materialtransport in der Logistik oder zur Erfassung und photogrammetrischen Rekonstruktion von Gebäuden und Baustellen.
Für den effizienten und sicheren Einsatz ist es wünschenswert, dass die Drohnen ihre Aufgaben selbstständig erledigen, also autonom agieren. Dadurch wird es möglich mithilfe Agenten-basierter Navigation die Drohnen auf Basis von Reinforcement Learning Ansätzen hinsichtlich unterschiedlicher Kriterien zu optimieren.
In dieser Arbeit soll ein Agent in einer Simulationsumgebung trainiert werden, um optimierte Flugpfade zu erlernen. Bei ausreichender Robustheit soll die Performance des Agenten auf einem realen System validiert werden.
Ziele und Arbeitsschritte
- Einarbeitung in ROS2 und die Programmierung autonomer Drohnen
- Anpassung der Simulationsumgebung und Training der Agenten
- Übertrag und Validierung auf realem System
Benefits
- Hands-On Erfahrung in der Entwicklung im Bereich Robotik
- Austausch mit anderen Studierenden am FAPS
- Einblicke in weitere Forschungsbereiche
- Anwendungsbezogene Arbeit für den Berufseinstieg
- Flexible Arbeitsweise
Hinweise zur Bewerbung
- Erste Erfahrung und Freude an der Programmierung
- Interesse am Robot Operating System
- Gute Englischkenntnisse erforderlich
- Sehr gute Deutscherkenntnisse erforderlich (mind. C1)
- Selbstständige Arbeitsweise
- Beginn jederzeit möglich
Systematische Literaturrecherche zum Einsatz von Wärmeleitmaterial in der Leistungselektronik (BA/PA)
Das Projekt Restladung umfasst die Entwicklung einer kosteneffizienten DC-Wallbox auf Basis einer Ein-Platinen-Lösung und einer passiven Wärmeabfuhr. Das Teilprojekt des FAPS fokussiert neben dem automatisierungsgerechten Produktdesign insbesondere die hochpräzise Montage der Leistungselektronik in das Gehäuse. Besondere Berücksichtigung gilt demnach der optimalen Wärmekopplung beider Komponenten durch den Einsatz von Wärmeleitmaterial.
Die Arbeit beinhaltet folgende Schwerpunkte:
- Einarbeitung in die theoretischen Grundlagen der Wärmeübertragung
- Relevanz der Wärmeableitung
- Materialklassen und Produkte
- Verarbeitungsprozesse
Anforderungen:
- Studium im Bereich Maschinenbau / IPEM / WING / Mechatronik / Elektrotechnik o.Ä.
- Hohe Motivation, Neugierde sowie eine selbständige und strukturierte Arbeitsweise
- Deutsch in Wort und Schrift
Bitte bewerben Sie sich mit einem aktuellen Notenspiegel und Lebenslauf.
Systematische Literaturrecherche zu Testing-Methoden elektrischer Kontakte eines Schaltrings (BA/PA)
Aufgabenstellung:
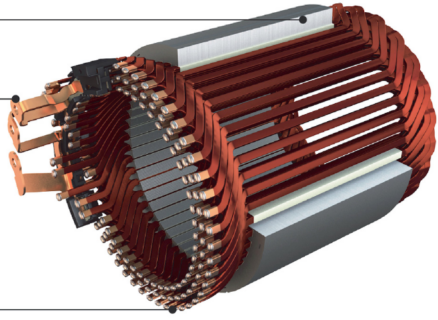
Im Kontext der Elektromotorenfertigung für schienengebundene Fahrzeuge haben sich diverse Motorkonzepte etabliert, welche vorwiegend auf massiveren Flachleitern beruhen. Deren Handhabung und Einbringung stellt auf Grund ihrer großen Biegesteifigkeit, gepaart mit der erforderlichen Formgebung, eine große Herausforderung dar. Auf Grund vergleichsweise geringen Stückzahlen werden gegenwärtig elementare Prozessschritte manuell umgesetzt. Deren Automatisierung stellt eine große Herausforderung innerhalb der Transformation der Mobilität im 21. Jahrhundert dar.
Ziel dieser studentischen Arbeit ist es, verschiedene Messmethoden für elektrische Kontakte im Kontext elektrischer Antriebe zu recherchieren und miteinander zu vergleichen. Neben einer grundlegenden Einarbeitung in die Themen Messtechnik und Kontaktierung sollen nach der strukturierten Literaturrecherche die Erkenntnisse auf das Anwendungsbeispiel eines Schaltrings für die Kontaktierung elektrischer Antriebe von schienengebundenen Fahrzeugen übertragen werden.
Die Arbeit beinhaltet folgende Schwerpunkte:
- Einarbeitung in den Kontaktierungsprozess von Elektromotoren
- Einordnung des Prozesses in die Fertigung
- Übersicht über Kontaktierungsverfahren
- Vorteile und Herausforderungen in der Fertigung
- Einarbeitung in den Themenkomplex Messtechnik
- Strukturierte Literaturanalyse zu Messmethoden elektrischer Kontakte im Kontext von Elektromotoren
- Identifikation und Kategorisierung wichtiger Kenngrößen für Kontaktstellen
- Vorstellung der wichtigsten Verfahren zur Messung dieser Kenngrößen
- Vergleich der Messverfahren anhand geeigneter Auswahlkriterien
- Begründung der Bewertung
- Übertrag der Erkenntnisse auf das Anwendungsbeispiel eines Schaltrings im Kontext elektrischer Traktionsantriebe
- Erarbeitung und Konzeptionierung weiterer Messmethoden für das Anwendungsbeispiel
Persönliche Voraussetzungen:
- Interesse an Fertigungsprozessen im Bereich Elektromaschinen
- Grundlegende Kenntnisse der Funktionsweise und des Aufbaus eines E-Motors
- Strukturiertes, lösungsorientiertes und wissenschaftliches Arbeiten
- Erste Erfahrungen im Bereich Kontaktierung und Messtechnik sind wünschenswert
- Deutsch und Englisch in Wort und Schrift
Weitere Informationen und Details sind bei Felix Wirthmann erhältlich. Eine Bearbeitung ist ab sofort möglich. Bewerbungen senden Sie bitte mit Notenauszug und Lebenslauf per E-Mail an den oben genannten Betreuer. KI-generierte, generische und fachlich unpassende Bewerbungen erhalten keine Rückmeldung.
Konzeption und Validierung der Kontaktierung eines Schaltrings für schienengebundene Fahrzeuge (BA/PA/MA)
Aufgabenstellung:
Im Kontext der Elektromotorenfertigung für schienengebundene Fahrzeuge haben sich diverse Motorkonzepte etabliert, welche vorwiegend auf massiveren Flachleitern beruhen. Deren Handhabung und Einbringung stellt auf Grund ihrer großen Biegesteifigkeit, gepaart mit der erforderlichen Formgebung, eine große Herausforderung dar. Auf Grund vergleichsweise geringen Stückzahlen werden gegenwärtig elementare Prozessschritte manuell umgesetzt. Deren Automatisierung stellt eine große Herausforderung innerhalb der Transformation der Mobilität im 21. Jahrhundert dar.
Ziel dieser studentischen Arbeit ist es, verschiedene Designideen für die Kontaktelemente eines Schaltrings im Kontext von Traktionsmotoren schienengebundener Fahrzeugs zu erarbeiten und miteinander zu vergleichen. Neben der Einarbeitung in das Themengebiet sollen bestehende und eigene Kontaktelementformen durchdacht, bewertet und anhand von geeigneten Tests die besten Kontaktelemente validiert werden.
Die Arbeit beinhaltet folgende Schwerpunkte:
- Einarbeitung in die Statorfertigung für Schienenfahrzeuge
- Einarbeitung in die Thematik Schaltringe
- Vorteile und Herausforderungen in der Fertigung
- Einarbeitung in den Kontaktierungsprozess
- Übersicht über Kontaktierungsverfahren
- Vorteile und Herausforderungen in Zusammenhang mit Schaltringen
- Erarbeitung verschiedener Kontaktelementformen
- Vergleich der erarbeiteten Varianten
- Bewertung der Kontaktelemente anhand geeigneter Auswahlkriterien
- Begründung der Bewertung
- Teil-Validierung der Kontaktelementform
Persönliche Voraussetzungen:
- Interesse an Fertigungsprozessen im Bereich Elektromaschinen
- Grundlegende Kenntnisse der Funktionsweise und des Aufbaus eines E-Motors
- Strukturiertes, lösungsorientiertes und wissenschaftliches Arbeiten
- Erste Erfahrungen im Bereich Kontaktierung
- Deutsch und Englisch in Wort und Schrift
Weitere Informationen und Details sind bei Felix Wirthmann erhältlich. Eine Bearbeitung ist ab sofort möglich. Bewerbungen senden Sie bitte mit Notenauszug und Lebenslauf per E-Mail an den oben genannten Betreuer. KI-generierte, generische und fachlich unpassende Bewerbungen erhalten keine Rückmeldung.
[PA/MA] Kontaktierung von primärisolierten HF-Litzen aus Aluminium mit Aluminiumkabelschuhen für induktive Ladepads (ab Nov/Dez)

Ausgangssituation:
Induktive Ladepads für elektrische Fahrzeuge erfordern hochzuverlässige und effiziente Kontaktierungen, insbesondere bei der Verwendung von primärisolierten HF-Litzen aus Aluminium. Aluminium bietet Vorteile wie geringes Gewicht und gute Leitfähigkeit, stellt jedoch besondere Anforderungen an die Kontaktierung aufgrund seiner Oxidationsanfälligkeit und mechanischen Eigenschaften. Ziel ist es, die Machbarkeit und Zuverlässigkeit der Kontaktierung zu demonstrieren.
Der Umfang der Arbeit umfasst dabei folgende Arbeitsinhalte:
-
Literaturrecherche: Untersuchung bestehender Kontaktierungstechniken für Aluminiumlitzen.
-
Konzeptentwicklung: Proof of Concept, der die Kontaktierung von HF-Litzen qualifiziert.
- Versuchsdurchführung: Testen der Kontaktierungen unter realistischen Bedingungen (z. B. Temperaturzyklen, Strombelastung) und Bewertung der elektrischen und mechanischen Stabilität.
-
Dokumentation: Auswertung der Ergebnisse und Erstellung einer detaillierten Dokumentation einschließlich Empfehlungen für die weitere Entwicklung.
Voraussetzungen zur Bewerbung:
-
Fachkenntnisse: Grundkenntnisse in Elektrotechnik und Materialwissenschaften, sowie Interesse an experimenteller Arbeit.
- Arbeitsweise: Selbstständige, strukturierte und präzise Arbeitsweise sowie Teamfähigkeit.
-
Sprachkenntnisse: Gute Deutschkenntnisse in Wort und Schrift; Englischkenntnisse sind von Vorteil für die Literaturrecherche.
Bewerbungen mit Lebenslauf und aktuellem Notenspiegel bitte per E-Mail an:
Sollten Sie in die engere Auswahl kommen, werden Sie per Mail kontaktiert. Ein Anruf ist nicht notwendig.
[BA/PA] Aufbau eines Versuchsstandes zur Kontaktierung von primärisolierten HF-Litzen

Ausgangssituation:
Hochfrequenzlitzen (HF-Litzen) werden in zahlreichen Anwendungen der Elektromobilität, eingesetzt, um Skin- und Proximity-Effekte zu minimieren. Eine Herausforderung besteht in der zuverlässigen Kontaktierung primärisolierter HF-Litzen. In diesem Kontext soll ein innovativer Ansatz verfolgt werden, bei dem die Litze induktiv erwärmt wird, um die Isolierung thermisch zu entfernen, während sie gleichzeitig mechanisch verpresst wird. Ziel ist es, einen Versuchsstand zu entwickeln, der diesen Prozess ermöglicht und die Kontaktqualität systematisch untersucht.
Der Umfang der Arbeit umfasst dabei folgende Arbeitsinhalte:
- Literaturrecherche: Untersuchung bestehender Methoden zur Kontaktierung von HF-Litzen und Analyse relevanter Technologien für induktive Erwärmung und mechanische Verpressung.
- Konzeptentwicklung: Entwurf eines Versuchsstandes, der die simultane thermische Abisolierung und mechanische Verpressung von HF-Litzen ermöglicht.
- Aufbau des Versuchsstandes: Konstruktion und Implementierung des Versuchsstandes, einschließlich der Auswahl geeigneter Komponenten für die induktive Erwärmung und Verpressung.
- Durchführung von Versuchen: Testen und Optimierung der Prozessparameter (z. B. Temperatur, Presskraft).
- Auswertung und Dokumentation: Analyse der Versuchsergebnisse hinsichtlich der Kontaktqualität (z. B. elektrischer Widerstand, mechanische Stabilität) und Erstellung einer umfassenden Dokumentation.
Nähere Informationen sowie Beginn und Umfang der Arbeit können in einem persönlichen Gespräch diskutiert werden. Eine Konkretisierung des Themas erfolgt nach Absprache.
Voraussetzungen zur Bewerbung:
- Fachkenntnisse: Grundkenntnisse sowie Interesse an experimenteller Arbeit und Konstruktion.
- Technische Fähigkeiten: Erfahrung im Umgang mit CAD-Software von Vorteil.
- Arbeitsweise: Selbstständige, strukturierte und sorgfältige Arbeitsweise sowie Freude an praktischer und theoretischer Arbeit.
- Sprachkenntnisse: Gute Deutschkenntnisse in Wort und Schrift; Englischkenntnisse sind von Vorteil für die Literaturrecherche.
Bewerbungen mit Lebenslauf und aktuellem Notenspiegel bitte per E-Mail an:
Sollten Sie in die engere Auswahl kommen, werden Sie per Mail kontaktiert. Ein Anruf ist nicht notwendig.
[BA/PA/MA] Simulation des Quellverhaltens von Kunststoffen im Kontext des Design for Recyclings von elektrischen Traktionsantrieben
Mit der weltweit steigenden Nachfrage nach Elektrofahrzeugen steigt auch die Notwendigkeit, kritische Rohstoffe aus ausgemusterten Traktionsantrieben zurückzugewinnen. Aktuelle Befestigungsmethoden, wie Epoxidkleber und Presspassungen, sind für die Funktionsfähigkeit optimiert, aber nicht für die Demontage oder Recyclingfähigkeit. Diese konventionellen Verfahren führen häufig zu einer Verunreinigung, zu mechanischen Beschädigungen oder zu einer thermischen Beeinträchtigung während der Demontage- und Recyclingprozesse.
Um diese Einschränkungen zu überwinden, besteht ein wachsendes Interesse an der Entwicklung neuartiger Fixierungsstrategien, die eine effiziente Trennung, Materialreinheit und Wiederverwendung des Systems ermöglichen. Solche Ansätze sollten sich an den Grundsätzen des Design for X (DfX) orientieren, insbesondere am Design for Disassembly und Design for Recycling, und gleichzeitig mit gesetzlichen Rahmenbedingungen wie der WEEE-Richtlinie (Waste Electrical and Electronic Equipment) in Einklang stehen.
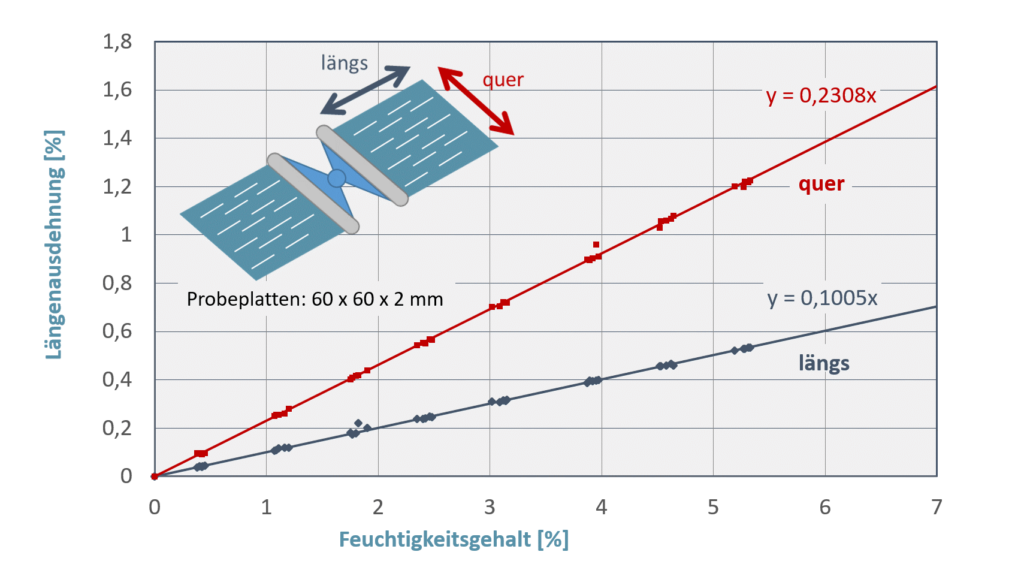
Das Ziel dieser Arbeit besteht darin, ein parametrierbares Modell in Ansys Maxwell zu erstellen, welches es erlaubt Anpassungen an Bauteilgeometrie, Bauteilmaterial und Luftfeuchtigkeit vorzunehmen. Der Vorgang soll mit Hilfe von Ansys Maxwell simuliert und ausgewertet werden.
Inhalte:
- Aufzeigen des Stands der Technik für Design for X
- Aufzeigen des Stands der Technik für die Kunststofftechnik und das Quellverhalten
- Einarbeiten in Simulationstechniken, insbesondere Ansys Maxwell
- Erstellen von CAD-Modellen
- Analyse und Bewertung des Simulationsmodells
Anforderungen und Informationen:
- Methodische und strukturierte Vorgehensweise
- Vorkenntnisse in der Simulationstechnik, insbesondere Ansys Maxwell
- Creo oder ähnliches
Forschung in einem Zukunftsthema mit hoher strategischer Bedeutung
Weitere Informationen auf Anfrage
Der Beginn der Arbeit ist ab sofort möglich. Aussagekräftige Bewerbungen sind bitte per E-mail inkl. Lebenslauf und aktuellem Notenspiegel zu stellen. Generische bzw. KI-generierte Anfragen werden ignoriert. Gute Deutschkenntnisse sind von Vorteil.
[BA/PA/MA] Elektromagnetische und thermische Simulation von induktiven Heizprozessen im Kontext des Seltenerd-Recyclings
Seltenerdmagnete sind essenziell für zahlreiche Zukunftstechnologien und spielen eine Schlüsselrolle in der Transformationsstrategie der Europäischen Union (EU). Besonders durch den wachsenden Bedarf in der Elektromobilität und Windenergie steigt die Nachfrage rasant. Gleichzeitig dominiert China den globalen Markt entlang der gesamten Wertschöpfungskette. Aufgrund dieser Abhängigkeit und der damit verbundenen Herausforderungen für die europäische Industrie hat die EU Seltene Erden (SE) wie Neodym, Dysprosium und Terbium als kritische Rohstoffe der höchsten Kategorie eingestuft. Zudem geht die Primärproduktion von SE-Magneten mit erheblichen Umwelt- und Klimabelastungen einher. Vor diesem Hintergrund bietet das Recycling von SE sowohl geopolitische als auch wirtschaftliche und ökologische Vorteile. Dennoch ist ein geschlossener Rohstoffkreislauf aufgrund technischer und organisatorischer Hürden schwer umsetzbar, weshalb derzeit weniger als ein Prozent der SE-Magnete in der EU recycelt wird.
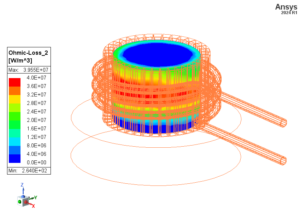
Um das Recycling der Permanentmagneten aus den Rotoren elektrischer Maschinen zu ermöglichen, müssen diese zunächst thermisch entmagnetisiert werden. Hierfür wird in einem laufenden Forschungsprojekt das Verfahren des induktiven Erwärmens genutzt.
Das Ziel dieser Arbeit besteht darin, ein parametrierbares Modell in Ansys Maxwell zu erstellen, welches es erlaubt Anpassungen an Rotorgeometrie, Induktorgeometrie und Induktorleistung vorzunehmen. Zur Optimierung des induktiven Heizprozesses, soll der Vorgang mit Hilfe von Ansys Maxwell simuliert und ausgewertet werden.
Inhalte:
- Aufzeigen des Stands der Technik für das Recycling von Seltenerdmagneten
- Aufzeigen des Stands der Technik für das induktive Erwärmen
- Einarbeiten in Simulationstechniken, insbesondere Ansys Maxwell
- Erstellen von CAD-Modellen der Rotoren, Magnete und Induktionsspulen
- Erstellen der Simulationsumgebung und Einbinden des parametrierbaren Modells
- Analyse und Bewertung des Simulationsmodells
Anforderungen und Informationen:
- Methodische und strukturierte Vorgehensweise
- Vorkenntnisse in der Simulationstechnik, insbesondere Ansys Maxwell
- Creo oder ähnliches
Forschung in einem Zukunftsthema mit hoher strategischer Bedeutung
Weitere Informationen auf Anfrage
Der Beginn der Arbeit ist ab sofort möglich. Aussagekräftige Bewerbungen sind ausschließlich per E-mail inkl. Lebenslauf und aktuellem Notenspiegel zu stellen. Generische bzw. KI-generierte Anfragen werden ignoriert. Gute Deutschkenntnisse sind von Vorteil.