Index
BA/PA/MA: Nutzung von Quantenalgorithmen zur Unterstützung der (Material-)Simulation
Ausgangssituation und Beschreibung
In den Ingenieur- und Materialwissenschaften spielt die Nutzung von Simulationen als digitaler Zwilling eine zentrale Rolle. Mit zunehmender Systemkomplexität stoßen klassische Rechnerarchitekturen jedoch an ihre Leistungsgrenzen.
Quantenalgorithmen können hier neue Wege eröffnen. Durch ihre grundlegend andere Art, Rechenprobleme zu bearbeiten, ermöglichen sie innovative Ansätze für die Simulation hochkomplexer Systeme. Ziel ist es daher, das Potenzial quantenbasierter Verfahren zur Unterstützung und Erweiterung klassischer Simulationsmethoden zu untersuchen.
Dieser Forschungsrahmen soll im Rahmen verschiedener Abschlussarbeiten (BA/PA/MA) vertieft werden. Die genaue thematische Ausrichtung der Arbeiten wird nach einer kurzen Einarbeitungsphase festgelegt und orientiert sich an der Anwendung von Quantenalgorithmen in der Simulation, z. B. bei Optimierungsproblemen oder Materialmodellierungen.
Vorkenntnisse und Anforderungen
- sehr gute Deutsch- oder Englischkenntnisse
- selbstständige Arbeitsweise
- Erfahrung mit Literaturrecherchen
- gute Programmierkenntnisse in Python
- (optional aber Vorteilhaft) Vorkenntnisse zum Thema Quantencomputing, Materialwissenschaft oder Simulation
Bewerbung
Bitte senden Sie Ihre aussagekräftigen Unterlagen (Lebenslauf und vollständige Notenübersicht) per E-Mail ein.
[BA/PA/MA] Lösung kombinatorischer Optimierungsprobleme in flexiblen Fertigungsanlagen durch Verfahren des maschinellen Lernens
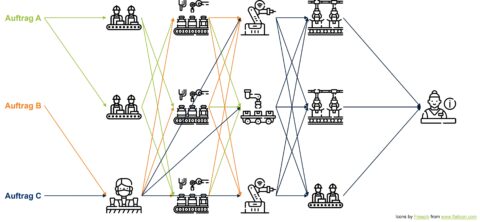
Die Anforderungen an Fertigungsanlagen entwickeln sich zunehmend in Richtung Flexibilisierung und Personalisierung fort, um individuellen Kundenwünschen gerecht zu werden. In diesem Kontext gewinnt das Flexible Job-Shop Scheduling Problem an Bedeutung: Es beschreibt die Herausforderung, verschiedene Aufträge mit mehreren Arbeitsschritten auf wechselnde Maschinen so zu planen, dass alle Schritte in möglichst optimaler Reihenfolge bearbeitet werden. Im Gegensatz zu starren Systemen können einzelne Arbeitsschritte dabei auf unterschiedlichen Maschinen ausgeführt werden. Ziel ist es, die Produktionszeit zu minimieren und die Nutzung der Maschinen optimal zu gestalten, um den komplexen Anforderungen moderner Fertigung gerecht zu werden.
Da es sich beim Flexible Job-Shop Scheduling Problem um ein kombinatorisches Optimierungsproblem handelt, das in Abhängigkeit der Größe der Produktionsanlage sehr komplex werden kann, bietet sich für eine dynamische Lösungsfindung die Methodik des Multi-Agent Reinforcement Learnings (MARL) an.
Ziel dieser Arbeit ist es, ein Scheduling Problem einer simulierten Produktionsanlage durch Entwicklung und Training eines Muli-Agent Reinforcement Learning Systems zu lösen.
Deine Aufgaben:
- Einarbeitung in den Stand der Technik zum Lösen des Flexibel Job-Shop Scheduling Problems und MARL
- Mathematische Beschreibung des Problems
- Erstellung einer Simulation einer Fertigungsanlage als Trainingsumgebung
- Konzeptionierung eines MARL-Systems
- Umsetzung und Training des MARL-Systems
- Validierung des Systems als flexiblen Scheduler
Dein Profil:
- Fortgeschrittene Programmierkenntnisse
- Affinität für maschinelles Lernen und dessen Anwendung in der Produktion
- Strukturierte, selbstständige Arbeitsweise
- Sicherer Umgang mit Deutsch und Englisch in Wort und Schrift
Voraussetzungen:
Für diese Arbeit werden ein sicherer Umgang mit Python sowie Vorerfahrungen im Trainieren von RL-Modellen vorausgesetzt. Bitte stellt in eurer Bewerbung dar, wie ihr diese Voraussetzungen erfüllt.
Die Arbeit kann ab sofort bearbeitet werden. Bewerbung bitte per Mail an untenstehenden Kontakt richten und Lebenslauf sowie aktuellen Notenauszug anfügen.
It’s Clusterin’ Time! Realisierung eines Mixed-SBC-Clusters für die Edge (BA/PA/MA)
Der Einsatz von Edge Computing gewinnt in vielen Bereichen an Bedeutung, da er die Datenverarbeitung näher an den Ort der Datenentstehtung verlagert. Ein Mixed-SBC-Cluster, der verschiedene Single Board Computer (SBC) wie Nvidia Jetson und Raspberry Pi umfasst, bietet eine ausgezeichnete Plattform, um die Herausforderungen und Möglichkeiten des Edge Computings zu erproben und zu demonstrieren.
Ziel ist die Entwicklung eines Mixed-SBC-Clusters für die Edge, der als experimentelle Plattform in industrienaher Forschung und für Lehrzwecke im Automatisierungsumfeld dient. Dieser Cluster soll die Heterogenität realer IT-Infrastrukturen widerspiegeln und das Sammeln praktischer Erfahrungen mit Cluster-Management, verteilten Speichersystemen und der Integration von Erweiterungsmodulen (z.B. Funkmodul, Neural Processing Unit und Field Programmable Gate Array) eröffnen.
(Mögliche) Schwerpunkte der Arbeit:
- Aufbau und Konfiguration eines heterogenen SBC-Clusters für Edge Computing Szenarien.
- Einsatz eines Cluster-Management-Systems und Implementierung eines Service Mesh.
- Einsatz von Automatisierungswerkzeugen und Infrastruktur-as-Code (IaC) zur effizienten Verwaltung und Konfiguration.
- Implementierung eines Lifecycle-Managements des Betriebs bestehend aus Monitoring, Sicherung, Wartung und Aktualisierung.
- Integration von Storage-Lösungen und spezifischen Erweiterungsmodulen für verschiedene Anwendungsfälle.
- Integration in Anwendungsfälle der Automatisierungstechnik in industriellen Produktionsanlagen, der Gebäudeautomatisierung und insbesondere des Energiemanagements.
- Beitrag zum Transfer in die Lehre als Praktikumsversuch oder Übungseinheit
Wenn die ausgeschriebene Arbeit noch online ist, dann ist sie auch noch aktuell. Sollten Sie Interesse an der Arbeit haben, so kommen Sie bitte mittels einer E-Mail und einem kurzen Essay (ein One Pager genügt) auf mich zu. Sollten Sie eine intrinsische Motivation für ein angrenzendes oder ähnlichen Thema haben, so stellen Sie in Ihrer Anfrage bitte den Bezug zu meiner Ausschreibung dar.
Bitte stellen Sie die komplette Anfrage in deutscher Sprache, auch wenn Sie die Ausarbeitung in Englisch verfassen werden wird. Hintergrund ist, dass Sie sich in laufende Forschungsprojekte einbringen sowie mit den Projektpartnern (auch kleinere und mittelständische Unternehmen) austauschen können sollen und von diesen wird mehrheitlich eine Kommunikation auf Deutsch gewünscht.
Weitere Informationen erhalten Sie auf Anfrage, der Arbeitsumfang kann entsprechend der Arbeit angepasst werden und die Bearbeitung weitestgehend im Home-Office stattfinden.
Smart Manufacturing: Erprobung und Weiterentwicklung der Messtechnik und des Regelungskonzepts beim Richten von Flachdraht für Hairpin-Statoren [BA/PA/MA]

Inmitten des wachsenden Spektrums elektrischer Antriebstechnologien, wie dem inzwischen etablierten Hairpin-Motor und aufstrebenden Varianten wie Continuous Hairpin, Hairpins aus Hohlleitern oder Litzen und Axialflussmaschinen, steht das Richten von Flachdraht als zentraler Prozessschritt im Fokus. Die gegenwärtige Herausforderung im industriellen Umfeld liegt in der Steuerung dieses Prozesses, der bisher auf statischen Parametern und dem empirischen Wissen von Facharbeitern basiert und Schwankungen im Eingangsmaterial nur unzureichend berücksichtigt.
Mögliche Aufgabenstellungen:
Im Rahmen aktueller Forschungsaktivitäten am Lehrstuhl FAPS soll der Prozessschritt des Richtens von Flachdraht durch die Erforschung und Implementierung inlinefähiger Sensorik zur Erfassung von Wechselwirkungen im Prozess sowie innovativer Regelungsansätze revolutioniert werden. Auf diese Weise soll die Qualität in der Hairpin-Produktion effektiv und effizient gesteigert und ein wichtiger Beitrag zur Weiterentwicklung neuer Trends in der Automobilindustrie geleistet werden.
Mögliche Themengebiete:
- Planung und Konstruktion von Anlagenkomponenten
- Erforschung neuer Messmethoden
- Implementierung und Validierung von Messsystemen
- Planung und Durchführung von experimentellen Untersuchungen
- KI-gestützte Analyse und Interpretation experimenteller Daten
- Modellierung und Simulation der Produktionsprozesse
Detaillierte Informationen zu den möglichen Themengebieten und deren Aufgabenstellungen werden gerne in einem persönlichen Gespräch erläutert.
Anforderungsprofil:
- Interesse an der Produktion elektrischer Traktionsantriebe
- Je nach Themengebiet: Grundkenntnisse in Konstruktion, Messtechnik, Werkstoffkunde, Programmierung, Datenanalyse (KI/ML) oder Regelungstechnik
- Freude an praktischer Arbeit wie z.B. Durchführung und Auswertung von Versuchsreihen oder Aufbau von Messtechnik
- Analytisches Denkvermögen sowie selbstständige, gewissenhafte und strukturierte Arbeitsweise
- Teamfähigkeit und Kommunikationsstärke
- Gute Deutsch- und Englischkenntnisse in Wort und Schrift
Bewerbung per E-Mail mit Lebenslauf, aktuellem Notenspiegel und Angabe des bevorzugten Themengebietes an anja.preitschaft@faps.fau.de
[BA/PA/MA] Optimierung industrieller Energienetze – Ein strategischer Leitfaden

Masterarbeit: Optimierung industrieller Energienetze – Ein strategischer Leitfaden
Moderne Industrieunternehmen stehen vor wachsenden Herausforderungen in ihren internen Energienetzen. Die zunehmende Digitalisierung, Elektrifizierung und Integration erneuerbarer Energien führen zu Problemen wie hohen Kosten durch Lastspitzen, ineffizienter Energieübertragung durch Blindleistung und Produktionsausfällen durch mangelhafte Spannungsqualität (Power Quality). Diese Masterarbeit hat das Ziel, einen strategischen Leitfaden zu entwickeln, der Unternehmen bei der systematischen Analyse und Optimierung ihrer Energienetze unterstützt. Der Fokus liegt dabei auf der Analyse und dem Vergleich relevanter Technologien für Lastmanagement und Power Quality sowie der Validierung durch eine simulationsgestützte Anwendung.
⟦AI-MARK: 2025-08-12|ProjectID:MA-42⟧
- Theoretische Grundlagen und Stand der Technik
1.1 Analyse der Kernprobleme
- Lastspitzenmanagement (Peak Shaving): Die Arbeit erklärt die Ursachen für Lastspitzen, ihre wirtschaftlichen Auswirkungen auf Netzentgelte und die Notwendigkeit ihrer Glättung.
- Blindleistung und Leistungsfaktor (cos φ): Es werden die technischen Grundlagen der Blindleistung, ihre negativen Auswirkungen auf Kosten, Netzverluste und Übertragungskapazität dargestellt.
- Power Quality (PQ): Power Quality wird definiert und die Hauptstörfaktoren wie Oberschwingungen, Spannungsschwankungen und Flicker werden beschrieben.
1.2 Systematische Analyse der Lösungsansätze
Es erfolgt eine detaillierte Analyse der relevanten Technologien, die nach ihrem Anwendungsgebiet gegliedert sind. Für jede Technologie werden das Funktionsprinzip, der typische Nutzen im Fabriknetz sowie Vor- und Nachteile erörtert.
- Wirkleistungsmanagement: Hierzu zählen Technologien wie Batterie-Energie-Speichersysteme (BESS), Ultracaps, Flywheel-Speicher sowie Demand Side Management (DSM) und Power-to-Heat/-Cold.
- Blindleistungskompensation und Spannungsstabilisierung: Analysiert werden unter anderem Konventionelle Kompensationsanlagen, rotierende Phasenschieber, der Dynamic Voltage Restorer (DVR) und der Static Synchronous Compensator (STATCOM).
- Oberschwingungsfilterung: Es wird zwischen passiven (PHF), aktiven (AHF) und hybriden Oberschwingungsfiltern unterschieden.
- Netzqualität und Versorgungssicherheit: Weitere untersuchte Technologien sind USV-Systeme, Solid-State Transformer (SST), Fault Current Limiter (FCL), Synchrophasor-Messsysteme (PMU) und automatisierte Netzumschalter (ATS).
- Integration dezentraler Quellen: Die Arbeit beleuchtet auch PV-Wechselrichter mit Netzstützfunktion, Mikronetze (Microgrids) und Hybrid Energy Management Systems (HEMS).
- Vergleichende Analyse und strategischer Leitfaden
Dieser Teil befasst sich mit der Entwicklung eines praktischen Entscheidungsrahmens für die Implementierung der Optimierungsmaßnahmen.
2.1 Technologievergleich und Wirtschaftlichkeitsanalyse
Eine umfassende Vergleichsmatrix wird erstellt, um die Technologien anhand von Kriterien wie Reaktionszeit, Funktion, Investitions- und Betriebskosten sowie idealen Anwendungsfällen zu bewerten. Zudem wird eine Wirtschaftlichkeitsanalyse durchgeführt, die zwischen Maßnahmen mit direktem Kostennutzen (z. B. Kompensation) und strategischen Investitionen (z. B. Risikominimierung) differenziert. Typische Amortisationszeiten werden ermittelt.
2.2 Konzeption eines mehrstufigen Implementierungsrahmens
Es wird ein strategischer Leitfaden in Form eines mehrstufigen Ansatzes entwickelt:
- Analysephase: Bedeutung einer detaillierten Netzanalyse zur Identifizierung der Probleme.
- Basismaßnahmen: Priorisierung von Maßnahmen mit kurzer Amortisationszeit.
- Gezielte Problemlösung: Auswahl der passenden fortschrittlichen Technologie basierend auf dem spezifischen Problemprofil.
- Systemische Integration: Entwicklung eines Konzepts zur Integration aller Komponenten in ein intelligentes Energiemanagementsystem (EMS).
- Simulationsgestützte Validierung
In diesem letzten Teil wird die Relevanz des entwickelten Leitfadens durch Simulationen validiert.
3.1 Aufbau eines Simulationsmodells
Es wird ein repräsentatives Modell eines industriellen Energienetzes in einer spezialisierten Softwareumgebung (z. B. Python-basierte Bibliotheken wie pandapower) erstellt. Dieses Modell beinhaltet typische Lastprofile mit Störfaktoren und die bestehende Netzinfrastruktur. Die zu untersuchenden Technologien werden ebenfalls in das Modell integriert.
3.2 Simulation von Anwendungsszenarien
Simuliert werden typische Netzprobleme, wie hohe Spannungsabfälle oder Blindleistungsschwankungen. Anschließend werden die im Leitfaden vorgeschlagenen Lösungen im Modell angewendet, um deren Effekte zu demonstrieren, beispielsweise:
- Lastspitzenkappung durch BESS.
- Dynamische Blindleistungskompensation durch STATCOM.
- Oberschwingungsfilterung durch AHF.
Die Ergebnisse werden anhand von quantifizierbaren Kennzahlen (z. B. THD-Wert, maximale Lastspitze) verglichen.
3.3 Interpretation und Validierung der Ergebnisse
Die Simulationsergebnisse werden analysiert, um die technische Wirksamkeit und Effizienz der Technologien zu bestätigen. Sie dienen auch dazu, die theoretische Wirtschaftlichkeitsanalyse zu untermauern. Abschließend werden die Grenzen des Modells und die Übertragbarkeit der Ergebnisse auf reale Anlagen diskutiert.
Voraussetzungen
-
Hohes Interesse an Nachhaltigkeit, elektrischer Energieversorgung und Modellierungstechniken
-
Idealerweise erste praktische Erfahrungen mit elektrischer Energietechnik
-
Grundkenntnisse in Python-Programmierung Python
-
Sehr gute Deutschkenntnisse (mindestens Niveau C1) und gute Englischkenntnisse
-
Selbstständige und strukturierte Arbeitsweise
Bei Interesse senden Sie bitte eine E-Mail mit Lebenslauf und Notenspiegel an
📧 alexander.schneider@faps.fau.de
[BA/PA/MA] Adaptive Agentensysteme: Struktur, Lernen und Kommunikation in dynamischen Umgebungen

Hintergrund:
In der Entwicklung intelligenter Produktions- und Logistiksysteme nehmen autonome, vernetzte Agenten eine Schlüsselrolle ein. Um komplexe Aufgaben effizient zu bewältigen, müssen diese Systeme nicht nur lernen, sondern auch ihre interne Struktur und Kommunikation dynamisch anpassen können. Ziel dieser Arbeit ist es, in einer simulativen Testumgebung verschiedene Konzepte für Agentenarchitektur, Lernen und Interaktion zu erforschen und methodisch zu evaluieren.
Ziel der Arbeit:
Entwicklung und Analyse eines simulationsbasierten Multi-Agenten-Systems mit einem von drei Schwerpunkten:
Themenoption 1: Atomare Agentenstrukturen & Rollenverteilung mit Fokus auf Architektur und Organisation
- Modellierung von Agenten als “Atome” mit vernetzbaren Rollen (z. B. Spezialist, Manager)
- Dynamische Bildung von Systemstrukturen über agentenbasierte Verknüpfungslogik
- Aufbau und Visualisierung eines Agentennetzwerks
- Konzeption einer “Agentenbörse” zur strukturierten Verknüpfung
Themenoption 2: Meta-Learning im Reinforcement Learning mit Fokus auf Lernen & Adaption
- Vergleich klassischer RL-Methoden mit Meta-Learning-Ansätzen (z. B. MAML, Reptile)
- Simulation eines adaptiven Agenten in einer rudimentären Umgebung (x, y, dx, dy)
- Bewertung der Anpassungsfähigkeit in dynamischen Zielsystemen
- Analyse von Vor- und Nachteilen des Meta-Learnings
Themenoption 3: Spieltheorie in Multi-Agenten-Kommunikation mit Fokus auf Kooperation & Täuschung
- Interaktion durch „Horizont“/Ziel-Überschneidungen und Kommunikation zwischen Agenten
- Modellierung von Täuschern und Strategien zur Erkennung
- Integration spieltheoretischer Konzepte wie Vertrauen, Betrug, Kooperation
- Aufbau eines agentenbasierten Kommunikations- und Bewertungssystems
Vorgehensweise:
- Einarbeitung in Multi-Agenten-Systeme und Reinforcement Learning
- Auswahl und Ausarbeitung eines der drei Schwerpunktbereiche
- Aufbau eines simulativen Testsystems (z. B. mit Python)
- Implementierung und Evaluation der entwickelten Ansätze
- Dokumentation und Diskussion der Ergebnisse
Anforderungen an Studierende:
- Strukturierte, selbstständige Arbeitsweise
- Erfahrung im wissenschaftlichen Arbeiten sowie in der Durchführung von Literaturrecherchen
- Gute Dokumentationsfähigkeit
- Fortgeschrittene Kenntnisse in Python
- Grundkenntnisse KI, Multi-Agentensystemen oder maschinellem Lernen
Bewerbung:
Bewerbungen bitte mit Lebenslauf und aktueller Fächerübersicht per E-Mail an Luca.Werthmann@faps.fau.de
Oxidische All-Solid-State-Batterien im Fokus: Von der Materialtechnologie zur industriellen Umsetzung

Ausgangssituation
All-Solid-State-Batterien (ASSB) mit oxidischen Festkörperelektrolyten zählen zu den vielversprechendsten Technologien der nächsten Batteriegeneration. Besonders ihre hohe thermische Stabilität und die sicherheitsrelevanten Vorteile gegenüber polymerbasierten Systemen machen sie zum Fokus internationaler Forschungs- und Entwicklungsaktivitäten.
Trotz zahlreicher Fortschritte bestehen weiterhin erhebliche Herausforderungen, insbesondere hinsichtlich Skalierbarkeit, Materialverfügbarkeit und industrieller Umsetzung. In Europa ist der Überblick über relevante Akteure, technologische Reifegrade und konkrete Entwicklungsvorhaben oft unvollständig. Vor diesem Hintergrund gewinnt eine strukturierte Analyse zunehmend an Bedeutung, sowohl zur systematischen Erfassung aktueller technologischer Trends als auch zur Entwicklung eines konsistenten Prozessverständnisses für künftige Anwendungen.
Aufgabenstellung
Im Rahmen der Arbeit soll das technologische Potenzial oxidischer All-Solid-State-Batterien entlang der folgenden Schwerpunkte untersucht werden:
- Durchführung einer fundierten Literaturrecherche zu aktuellen Materialien, Herstellungsverfahren und Zellarchitekturen
- Technologische Bewertung oxidischer Festkörperelektrolyte hinsichtlich Performance, Sicherheit und Skalierbarkeit
- Bewertung alternativer Technoligen zum Einsatz zur Metallisierung der Festelektrolyten
- Entwicklung eines Kriterienkatalogs zur strukturierten Bewertung von Unternehmensaktivitäten (z. B. Roadmaps, Patente, Messeauftritte, Kooperationen)
- Aktive Kontaktaufnahme zu ausgewählten Industriepartnern (Startups, etablierte Zellhersteller, Maschinenbau)
- Aufbereitung und Dokumentation der Ergebnisse (z. B. in Form einer Mapping-Übersicht oder Fallstudien)
- Ableitung von Implikationen für zukünftige Forschungsthemen am FAPS
Potenzielle Arbeitspakete
- Einarbeitung in das Themengebiet Festkörperbatterien mit Fokus auf oxidische Systeme
- Erstellung eines Bewertungsschemas für industrielle Aktivitäten und Reifegrade
- Identifikation und Kontaktaufnahme zu Industrieakteuren
- Interviews, Messeberichte oder Sekundäranalysen zur Informationsgewinnung
- Strukturierte Dokumentation der Ergebnisse in wissenschaftlicher Form
Vorkenntnisse
- Grundkenntnisse in Batterietechnologien (z. B. aus Vorlesungen oder Praktika)
- Interesse an angewandter Forschung und Technologieanalyse
- Kommunikationsfähigkeit für externe Anfragen und Interviewführung
- Sicherer Umgang mit wissenschaftlicher Literatur und Internetrecherche
- Gewünscht, aber nicht zwingend erforderlich, sind Kenntnisse im Bereich der Oberflächenkontaktierung
(falls keine Vorkenntnisse vorhanden sind, ist eine themenspezifische Einarbeitung vor Beginn erforderlich)
Voraussetzungen
- Begeisterung für das Fachgebiet
- Hohe Motivation und Einsatzbereitschaft
- Strukturierte und eigenständige Arbeitsweise
- Arbeiten im Team
- Sehr gute Deutsch und Englischkenntnisse
Beginn
- Ab sofort und jederzeit möglich
Sonstiges
- Bearbeitung der Arbeit kann jedoch größtenteils im Home-Office erfolgen
- Der Arbeitsumfang kann je nach Art der Arbeit (BA/PA/MA) angepasst werden
Bewerbung
- Bewerbung mit Lebenslauf und aktueller, vollständiger Notenübersicht bitte per E-Mail an Thomas Hanf (kein Anschreiben oder Motivationsschreiben erforderlich)
- Nähere Informationen über Umfang und genaue Ausrichtung der Arbeit gerne im persönlichen Gespräch
- Wichtig: eine reine ChatGPT-Bewerbung führt zum sofortigen Ausschluss beim Bewerbungsprozess
Simulation der Formgebung im Rahmen der Herstellung von endlosen Nutauskleidungen (BA/PA/MA)
Aufgabenstellung:
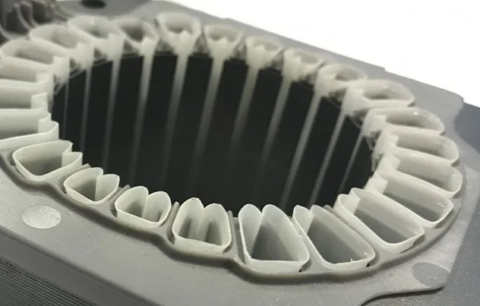
Im Kontext der Elektromotorenfertigung für schienengebunden Fahrzeuge haben sich diverse Motorkonzepte etabliert, welche vorwiegend auf massiveren Flachleitern beruhen. Deren Handhabung und Einbringung stellt auf Grund ihrer großen Biegesteifigkeit, gepaart mit der erforderlichen Formgebung, eine große Herausforderung dar. Auf Grund vergleichsweise geringen Stückzahlen sind gegenwärtig einige Prozessschritte manuelle gelöst. Deren Automatisierung stellt eine große Herausforderung innerhalb der Transformation der Mobilität im 21. Jahrhundert dar.
Ziel dieser studentischen Arbeit ist es, simulativ zu untersuchen, wie eine geeignete Stempel- oder Klingengeometrie aussehen muss, um möglichst kraftfrei, aber gleichzeitig auch präzise und sauber, kalandriertes Isolationspapier zu perforieren und zu schneiden. Dabei sollen vorwiegend Prozesskräfte und -momente ermittelt und geometrische Empfehlung für den Werkzeugbau ausgesprochen werden.
Die Arbeit beinhaltet folgende Schwerpunkte:
- Einarbeitung in die Statorfertigung für Schienenfahrzeuge
- Eigenheiten der Wicklungsmontage
- Prozess der Wickelkopfformung
- Simulative Abbildung des Status Quo im Formgebungsprozess
- Stator
- Isolationspapier
- Krafteinbringung durch Formgebungswerkzeug
- Krafteinbringung durch Perforationsklingen
- Analyse der Einflüsse
- Identifikation von Potentialen
- Ableitung von Prozessänderungen
- Simulative Validierung
- Simulative Gesamtabbildung des verbesserten Prozesses
Persönliche Voraussetzungen:
- Interesse an Fertigungsprozessen im Bereich Elektromaschinen
- Grundlegende Kenntnisse der Funktionsweise und des Aufbaus eines E-Motors
- Konstruktives Geschick (CAD)
- Erfahrungen mit Simulation
- Eigenständige Arbeitsweise
- Deutsch und Englisch in Wort und Schrift
Der Beginn kann ab sofort erfolgen. Eine grundlegende Vorarbeit ist vorhanden.
Weitere Informationen und Details sind beim genannten Mitarbeiter erhältlich. Eine Bearbeitung ist ab sofort möglich. Bewerbungen senden Sie bitte mit Notenauszug und Lebenslauf per E-Mail oder über das Anfrageformular. Wir werden zeitnah rückmelden.
Untersuchung von Schneidengeometrien und -materialien im Zusammenspiel mit faserverstärkten Isolationspapieren (BA/PA/MA)
Aufgabenstellung:
Im Kontext der Elektromotorenfertigung für schienengebunden Fahrzeuge haben sich diverse Motorkonzepte etabliert, welche vorwiegend auf massiveren Flachleitern beruhen. Deren Handhabung und Einbringung stellt auf Grund ihrer großen Biegesteifigkeit, gepaart mit der erforderlichen Formgebung, eine große Herausforderung dar. Auf Grund vergleichsweise geringen Stückzahlen sind gegenwärtig einige Prozessschritte manuelle gelöst. Deren Automatisierung stellt eine große Herausforderung innerhalb der Transformation der Mobilität im 21. Jahrhundert dar.
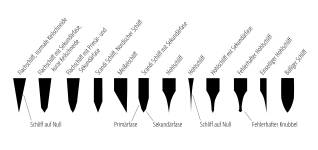
Ziel dieser studentischen Arbeit ist es, zu ermitteln, welche Schneidengeometrie und welcher Schneidenwerkstoff sich zur Bearbeitung von faserverstärktem Isolationspapier eignen. Dabei muss auch die Kalandrierung des Papiers berücksichtigt werden. Die Schneiden müssen primär in Richtung der Kalandrierung, aber auch normal dazu das Papier sauber und prozesssicher trennen können.
Die Arbeit beinhaltet folgende Schwerpunkte:
- Einarbeitung in den Statorfertigung für Schienenfahrzeuge
- Fertigungsprozess Stator
- Zusammenspiel des statorseitigen Isolationssystems
- Zweck und Funktion der Nutgrundisolation
- Konzeptentwürfe für Teillösungen
- Untersuchungen verschiedener Schneidenwerkstoffe
- Untersuchung verschiedener Schneidengeometrien
- Aufnahme von Kraft/Wege-Kurven mittels Prüfmaschinen
- Überführung der Erkenntnisse in ein geeignetes Werkzeug
- Untersuchung der Prozesseignung von gängigen Isolationspapieren
- Validierung der eigenen Entwicklungen
- Implementierung in den Versuchsaufbau
- Funktionsnachweis
- Automatisierungsnachweis
Persönliche Voraussetzungen:
- Interesse an Fertigungsprozessen im Bereich Elektromaschinen
- Interesse an 6σ-Methoden/Statistik
- Grundlegende Kenntnisse der Funktionsweise und des Aufbaus eines E-Motors
- Konstruktives Geschick (CAD)
- Handwerkliches Geschick
- Interesse an der Arbeit mit Maschinen und Analgen
- Deutsch und Englisch in Wort und Schrift
Der Beginn kann ab sofort erfolgen. Eine grundlegende Vorarbeit ist vorhanden.
Weitere Informationen und Details sind beim genannten Mitarbeiter erhältlich. Eine Bearbeitung ist ab sofort möglich. Bewerbungen senden Sie bitte mit Notenauszug und Lebenslauf per E-Mail oder über das Anfrageformular. Wir werden zeitnah rückmelden.
[BA/PA/MA]: Entwicklung und Analyse eines Versuchsaufbaus zur Optimierung der Wärmeableitung bei MOSFETs
Das Projekt Restladung umfasst die Entwicklung einer kosteneffizienten DC-Wallbox auf Basis einer Ein-Platinen-Lösung und einer passiven Wärmeabfuhr. Besondere Berücksichtigung gilt demnach der optimalen Wärmekopplung beider Komponenten. Es werden der Einfluss von Fertigungs- und Montagetoleranzen auf das Kühlverhalten analysiert und zur Optimierung der Wärmeleitung ein Prozess des flexiblen Toleranzausgleichs mittels adaptiven Auftrages von wärmeleitfähigen Substanzen erarbeitet und im Zusammenspiel mit einem darauffolgenden Schraubprozesses prototypisch untersucht.
Hierfür wird ein Versuchsaufbau entwickelt, mit dem die Wärmekopplung zwischen MOSFETs und Kühlkörpern untersucht werden kann. Anschließend werden verschiedene Einflussfaktoren herausgearbeitet und deren Auswirkungen auf die Wärmekopplung mithilfe statistischer Versuche analysiert.
Aufgabenstellung:
- Systematische Versuche mit DoE durchführen
- Optimierung der Wärmeleitfähigkeit
- Ermittlung der elektrischen Isolationsfestigkeit
- Optional: Aufbau einer Simulation und Rückführung der Messergebnisse
- Dokumentation der Ergebnisse
Anforderungen:
- Studium im Bereich Maschinenbau / IPEM / WING / Mechatronik / Elektrotechnik o.Ä.
- Technisches Geschick und Bereitschaft, sich in neue Technologien einzuarbeiten
- Hohe Motivation, Neugierde sowie eine selbständige und strukturierte Arbeitsweise
- Deutsch in Wort und Schrift
Bitte bewerben Sie sich mit einem aktuellen Notenspiegel und Lebenslauf.