



Mobile, ad-hoc kooperierende Roboterteams
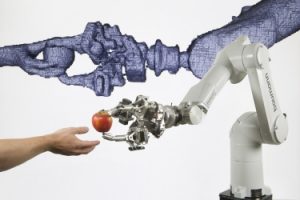
Durch Kombination der Mensch-Roboter-Kooperation und ortsflexiblen Robotersystemen kann eine neue Form des Teams innerhalb der Fabrik definiert werden, um durch die ergänzende Kombination von Fähigkeiten gemeinsam eine produktionstechnische Aufgabe zu lösen. Hierdurch werden neue Potenziale für die Fertigung und Montage erschlossen. Besonders relevant sind hierbei Aspekte wie die Assistenz bei manuellen Tätigkeiten, die Mensch-Roboter- sowie die Roboter-Roboter-Kollaboration.
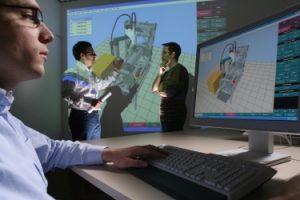
Neben der Verwendung von integrierten Datenmodellen in allen Nutzungsphasen, einer für mobile Robotersysteme optimierten intelligenten Produktionsplanung und -steuerung, erfordert eine erfolgreiche Teamzusammenarbeit eine flexible und leistungsstarke ad-hoc Vernetzung, eine möglichst ganzheitliche Umgebungserfassung und -interpretation sowie eine auf die jeweilige Teamkonstellation und Aufgabenstellung abgestimmte Bewegungsplanung. Darüber hinaus spielt die Nutzerakzeptanz für mobile Robotersysteme in der Produktion sowie insbesondere die Intuitivität der Mensch-Roboter-Interaktion eine entscheidende Rolle für eine zukünftige, erfolgreiche Etablierung solcher Systeme im Produktionsumfeld. Diese und weitere wissenschaftliche Fragestellungen werden im Rahmen des Verbundforschungsprojektes FORobotics der Bayerischen Forschungsstiftung adressiert.
Im Forschungsverbund sind über eine Laufzeit von drei Jahren acht Forschungs- und 19 Industriepartner beteiligt. Forschungsseitig werden die adressierten Themen durch Partner der Universität Augsburg, der Universität Bayreuth, der Friedrich-Alexander-Universität Erlangen-Nürnberg, der Technischen Universität München, der Universität der Bundeswehr München sowie der Fraunhofer-Einrichtung IGCV aus Augsburg fokussiert.
Laufzeit: Q1/2017 – Q4/2019
Förderer: Bayerische Forschungsstiftung
Website: www.forobotics.de